昨日GPSが動いているようなので、早速頑張って外出して、屋外フライト行ってきました。
空撮用のKK2.0と2機、比較もしてみたくてo(^-^)
画像が・・・実は友人に同行してもらって、撮影を頼んだのですが、イロイロ勘違いで残っていません(^0^;)
KK2.0 フライトコントローラーは本当に良く出来ていると思いますし、とても自由なレイアウトにも柔軟に対応できます。LCD付き+セレクトスイッチ付きで、単体で調整が出来るのは大きなメリットです。
一方、MultiWii フライトコントローラーは、レイアウトも基本的に用意された「一般的な」レイアウトに従うようになります。
(もちろんarduinoのスケッチを理解、把握、応用出来るなら話は別です)
しかし!KK2.0の6軸ジャイロだけで十分などと思っていた自分がちょっと恥ずかしくなりました。
磁気センサー、高度(気圧)センサー、そしてGPSレシーバー
これらを組み合わせたとき、驚くほど「操縦が簡単になった」と感じました。
また上記のセンサー以外の拡張性も高く、Bluetoothユニットを使用すればAndroidアプリで制御設定からフライト中のステータスモニターまで出来てしまうようです。(Bluetooth信号の到達距離内)
近日中にテスト予定です。(タブレット、スマホ共にappleな管理人にはちょっとキツイ選択でした)
BluetoothアダプターをRC Timerから購入してみましたが、技適認証どころか、ブルートゥースマークも取得されていないので、もったいないと思いつつ破棄しました。
海外のラジコンショップ等で販売されているmultiwii用Bluetoothアダプターは、2013/03/20現在、管理人の知る限り日本国内の電波法技適認証を受けていません。
もう少しテストをした後に、MultiWii フライトコントローラーについての詳細記事を書こうと思っています。
もう一つ
先日の記事に書きましたHK製MultiWiiフライトコントローラーの不具合修正してみました。
ホビキンがリコールなんてするわけもなく(^0^;)・・・表面実装トランジスタの手ハンダが出来れば難しいものでもありません。(ま、結局どこまで行っても自己責任の範囲です)
赤矢印の先の部分 GNDになっているパターンの一部のレジスター塗料を優しく削り落とします。左に写っているのは0.4sqの単線(電子工作で持っていたもの)
単銅線を画像のようにICチップの下側真ん中とGNDを繋ぐようにハンダ付け
テスターで導通確認、ICチップのハンダブリッジ(短絡)が無いことを確認して・・・
UBECを外部電源端子に接続してLEDが点灯することを確認。
外部電源を必要とするほどの周辺機器を付ける予定は無いのですが、いつでも使えるようにと言うことでo(^-^)。
(。・_・)ノ
↧
MultiWii MEGA搭載 マルチコプター屋外飛行いってきました。
↧
自作マルチコプターで空撮してきました。コブシ?の花
そろそろ桜のつぼみもほころんだ頃と、友人に誘われ近所の桜の木を徒然に眺めて廻りました。
(もちろん運転は友人。。。(^0^;)
@5日後ぐらいが桜の一番綺麗に咲く感じかな・・・と、用意してきた空撮用マルチ機を飛ばさず帰るのも寂しいので、今が一番綺麗な花を付けているコブシ(ハクモクレンかも)の花を空撮してみました。 (花の名前についてのご指摘は遠慮させてください)(^0^;)
大きな木々を揺らすほどの強風ではありませんが、風が有ったため無理しない程度の高度で撮りました。
FCにはKK2.0を使用しています。
確かにGPS搭載機を体験してしまうと「楽ちん」ではありませんが、コストパフォーマンスとして考えれば、スゴイ!と再認識しました。
ちなみにカメラは一般的な軽量ハンディカムなので手ぶれ補正込みでHD映像が撮れます。
従って、特殊なマウントもしていません。カメラジンバルマウントに直でネジ固定しています。
(空撮専用カメラのように軽量ではありませんし、広角でもありませんが。。)
(。・_・)ノ
↧
↧
MultiWii FC 入門レベルのメモ記事
本記事は管理人がMultiWii フライトコントローラーの利用を目的として、arduino、ARVプログラミングに関連する事柄を理解するためにメモ的記録です。
非同期シリアル通信
RS232Cなどに代表される送信側、受信側の同期を取らないデーター通信方式
少ない線数で通信が行える。
配線接続端子の表示は主に、TX、RX、G(グランド)と書かれている事が多い。
配線接続は
送信側 受信側
TX端子 → RX端子
となる事を忘れないようにする。
MultiWiiFCにGPSユニットをシリアルポート接続する場合
FC側TX端子→GPSユニットRX端子
FC側RX端子→GPSユニットTX端子
VDD 、GNDは同じ表示の端子で接続
電源電圧、信号電圧の異なる機器を使う場合は特に注意が必要
UART Universal Asynchronous Receiver-Transmitter)
調歩同期方式によるシリアル信号をパラレル信号に変換したり、その逆方向の変換を行うための集積回路
UARTに同期式シリアル信号を変換する回路を追加したものが、USART。
I2C (Inter-Integrated Circuit)
正式な呼び方は「アイ・スクエアド・シー」、通称で「アイツーシー」
フィリップス社が提唱の高速通信可能な同期式シリアル通信方式。
信号線(SCL.、SDA)2本+電源線VDDで通信する。グランド(G)も含め4線で使用されることが多い。
マスター(EEMROM付きプロセッサーなど)、スレーブ(各種センサー)複数というパーティ構成が可能
オープンコレクタのため信号線とVDD間にPull-up抵抗が必ず接続される。
抵抗の値は使用する機器、電源電圧によって異なる。
まだまだ続く
(。・_・)ノ
↧
噂の?Turnigy 9XR(ラジコン送信機)箱だし~動画
暫く放置状態だったTurnigy 9XRを箱だし~ を動画にしてみましたので、公開しました(^_^)
コストパフォーマンスは抜群です・・・が、従来の9X同様、取扱説明書(特に日本語)は無いに等しく、自身で探すことになります。(国内でも情報を提供されているサイトもあるようです)
本体下部にAVRISP接続用6ピンがあります。
※オープンソースなのでこのあたりに精通している方はご自身でファームウェアのアップデートもできます。
情報についてはほぼ英語ですが、ブラウザの翻訳機能を利用していけば、以前ほど困難では無いかもしれません。
接続がバランス端子というのがなかなかニクい事をしてくれます。
本体用のバッテリーですが、もし手持ちに、やや内部抵抗値が上がってフライトにはそろそろダメかな?という3s2200mAh程度のバッテリーがあれば、それでも…。(自己責任で!)
(。・_・)ノ
↧
ライトアップ夜桜撮影してきました。
例年に無い桜の早咲きに各地の「桜祭り」は開催を中止されたりと、例年「さくら祭り」を楽しみにされていた方には少々気の毒な今年の「桜」です。
健康状態がやや低迷している管理人![]() を 気遣ってくれる友人が、「今年の桜も見納めだからライトアップされているらしい公園いってみよう」とつれて行ってくださったので、NEX-5Nで撮影してきました。
を 気遣ってくれる友人が、「今年の桜も見納めだからライトアップされているらしい公園いってみよう」とつれて行ってくださったので、NEX-5Nで撮影してきました。
健康状態がやや低迷している管理人
 を 気遣ってくれる友人が、「今年の桜も見納めだからライトアップされているらしい公園いってみよう」とつれて行ってくださったので、NEX-5Nで撮影してきました。
を 気遣ってくれる友人が、「今年の桜も見納めだからライトアップされているらしい公園いってみよう」とつれて行ってくださったので、NEX-5Nで撮影してきました。



サムネイル表示になるとけっこう緑(葉)にみえますが、目で見た 印象はもっと『さくら色』でした。
印象はもっと『さくら色』でした。
久しぶりに「感動」しました。
昼間の満開状態の桜も素晴らしいですが、明日のはもう・・・という感じの桜も風情があって良いものですね。
天気予報では非常に強い低気圧が来ると言っていたので、本当に今年最後のチャンスだったかもしれません。
(。・_・)ノ
↧
↧
EDF(ダグテッドファン)の発泡スチロール機作ってみました。
かれこれ15年ほど前でしょうか、自分の不注意でラジコン飛行機(エンジン機)のプロペラで人差し指の爪を縦割りして、「飛行機恐怖症?」になっていました![]()
まぁ、いまでもマルチのプロペラは怖いのですが、その分慎重になっているのが幸いしているのか、最初の頃、制御の設定方法が理解出来ていないときジャイロが逆でうわっとなったことはありましたが、怪我にはいたっていません。![]()
元々が飛行機好きなので、EDFのウィング機を見かけてついポチってしまいました。
足が不自由なんだから飛行機は飛ばせないと判っていながら(苦笑)

まぁ、いまでもマルチのプロペラは怖いのですが、その分慎重になっているのが幸いしているのか、最初の頃、制御の設定方法が理解出来ていないときジャイロが逆でうわっとなったことはありましたが、怪我にはいたっていません。

元々が飛行機好きなので、EDFのウィング機を見かけてついポチってしまいました。
足が不自由なんだから飛行機は飛ばせないと判っていながら(苦笑)

例によってHK製です(*゚∀゚*)

キャノピー内部 意外と狭いです。40A ESC付き
バッテリー3s2200 が縦方向やっと入るサイズです

かんざし(左右の翼を連結して強度を確保する)はカーボンチューブ(T1.5ぐらいのしっかりしたもの)
かんざしを貫通させる穴のすぐ横に接着剤(中粘度以下のCA)流し込み用のスロットがあります。この工夫当たり前と言えば当たり前なのですが、管理人には「ほぉぉぉぉ」というほど感動しました。
それと、胴体にある2つの凹みは「ハンドランチ(手投げ離陸)」用のものです。EDF機ならではの工夫の1つですね。
とまぁ、作るのは瞬間接着剤にもよりますが、ものの2時間もあればメカ積みまでいけちゃうかんじです。
気になったブラシレスモーターの回転方向も購入状態で正回転(モーター出力端から見て反時計回り)。問題無しでした。
・・・5000kVのモーターを3S(11.1V)駆動です。フルスロットルで5万回転/分
その割りに振動が大きいかなぁ・・・
エレボンの2つのサーボも中立点でOKでした。EDFの振動はコスト的に無理も無いかんじでしょうか。
いやはや、ホビキンこんなにちゃんとしたものも売るんですね((^_^;)\(・_・) オイオイ
まぁ、翼上面のロゴと言い空飛ぶ広告カヨっって・・・思ったりもしますが
(。・_・)ノ
↧
walkera genius CP ブラシレスモーター化してみました。
とある事情で、ブラシレスモーターキットが1セット・・・手元に残ったので
所有機に取り付けてみました。
メーカー純正アップグレード?(アップか?と思ったり思わなかったり)キットなので
サイズ的な問題はあまり感じません。
ただし、アウトランナーモーターで、サイズが二回りほど大きいため、キャノピー(カウル)と干渉する部分は加工が必要ですね。
所有機に取り付けてみました。
メーカー純正アップグレード?(アップか?と思ったり思わなかったり)キットなので
サイズ的な問題はあまり感じません。
ただし、アウトランナーモーターで、サイズが二回りほど大きいため、キャノピー(カウル)と干渉する部分は加工が必要ですね。

けっこうざっくり切り取らないといけません(^0^;)
キャノピーは軽量化のためとても薄く、はさみやカッターでも切れます。
管理人は切断面からの亀裂が入りにくくなるスチロールカッターで加工しました。
モーターの固定時にはしっかりとバックラッシュの調整も必要です。

シンプルな構造なのでバックラッシュの調整もしっかり 。
。
↑この画像でわかるように、ノーマルではバッテリーコネクターが左側だったものが、右側になります。(ESCのレイアウト上こうなるはずですw)

こんな感じでESCユニットを両面テープで固定しています。
(画像は組立時の固定前のものでわかりやすいかな、と撮影しておいたものです)
室内ホバリングの印象は、ちょっと難しくなったかな?・・・という印象でしょうか
ブラシレスモーター特有の立ち上がり時のスロットルワーク(15%ぐらいスッと上げないと回らない)
最大回転域(95%~)での息付きなどなど、初めてブラシレスモーターを扱う人でしたら、故障?と思ってしまう程顕著に出ます。(送信機のスロットルカーブで調整出来ます)
ジャイロ関連もおそらくノーマルモーターに最適化された制御値のままですので、ややふらつきがでたりすることもあります。
とはいえ、ノーマルモーターをくたびれるほど練習をされた方なら、この運動性能は楽しい
はずです。
管理人は3Dアクロなどできませんが、それでも1m程 急上昇させてみたとき、いままでピッチに負けて回転数が下がっていたのが、スッと高度が上がり、これがスタント機の基本性能か!とちょっと感動しました。
モーター、ESCユニットなど重量増もあってキット付属のバッテリーでも飛行時間は短くなりますが、コレはコレであり!と思いました
・・・屋外で3Dの練習・・・夢で終わりそうな今日この頃
(。・_・)ノ
↧
PR: それは、ただのビジネスか。クオリティ・ビジネスか。
 |
| 情報の質、量、スピード。今、あなたは、試されている。 |
↧
マルチコプター(Multicopter) 自作、製作の注意点 part 1
タイトルはたいそうご立派なので恐縮しますが、これからマルチコプターを自作するときに、ここはよく考えとくといいかなと思われる事柄を記録しておこうと思います。
最終更新日 2013/04/26
重要注意事項
マルチコプターは、特別な例を除き、複数のモーター、プロペラのうち、一つでも異常が発生すると即「墜落」となってしまいます。このときに正常なプロペラ、モーターの制御状態によっては、急激に思わぬ方向へ飛んでしまうこともあり得ます。
従って、プロペラの固定方法、モーターの固定方法や、ESCとの結線など充分な注意が必要です。
また、プログラマブルESCを使用する場合、デフォルトで電源電圧を監視して、自動で過放電防止をするモノもありますが、マルチコプターでは、この親切設計が逆に危険な状態にしてしまう事もありますので、これらの危険についての知識とそれらへの対策について処置が出来るまでは、この機能を出来る限り低電圧にする、もしくはオフにして、別途、過放電防止用のアラームを取り付ける等の対策を強くお進めします。
2013/01/05 追記
マルチコプターというVTOL機の模型について、インターネット上での日本語の情報も増えてきました。
いまや、携帯電話もスマホが主流となるほどインターネット社会になって、本当に手軽に様々な情報を容易に得ることが出来るようになっています。
このブログは管理人の愚痴も含みますのであえて記しますが、空中を時速60Km/h以上で移動することも可能な「飛行機」です。そしてどんなに注意しても事故は起こりえます。
危険予知、予防は全てに最優先される事は是非ご理解いただきたいと思います。
そこで本記事では、今後各項目ごとに「どのような危険が予想されるか」についても管理人が判る範囲ですが、併記していきます。
またまた、前置きになってしまいますが、自作機の各パーツ、kitは全て「素材」です。
各部品、kitにメーカー推奨と表示されている組み合わせでも、構成部品の一部を修正したり追加工する必要があったりします。
これらの加工のためだけに道具工具を用意すると、意外と高額な出費になってしまいます。
管理人はこの点でかなり「失敗しちゃったかな・・・」とずいぶんとお小遣いを減らしています。
1,フレーム(機体)選択
市販の木製フレームから、FPR、CPRまで様々な素材のフレームが、ぱっと見、安価に販売されています。国内のwebショップでは日本語の取説付きというだけで数倍~10数倍の価格で販売しているものも見かけます。
メーカー名や生産国にこだわらなければ、木製Quad(4脚)フレームは送料別で8ドル(およそ640円)で買えます。これでも、Span(対向するモーター軸間)は539mmあります。モーター、ESCをケチらなければ、コンパクトデジカメ(200g)程度を搭載しても問題のないサイズです。注・・・あくまでも搭載できるという視点からです。
また、木製フレームキット(Span450mm)にモーター(ブラシレス)がセットになって30ドルで売られているのもあります。付属のモーターの品質云々は置いておいても、ブラシレスモーターが4つ付いて30ドルって・・・・。最初の機体で室内メインとしていなかったら、私はこれを最初に買っていたはずです(*^▽^*)
管理人の知る限り安価なフレームキットには、最大装備重量の記載のないものがあります。
飛行中のフレームにかかる荷重は意外と大きなものです。
構造、材質などなど要素は多岐にわたり、どうしたら・・・と、考えることが多いのですが、管理人は「正しく組み上げて、最小構成の軽量な状態でシェイクダウン(試験飛行)時にたわみや、異常な振動、音を注意深く観察し、少しでも異常と感じる場合には、潔く飛行を中止する」としています。
Quad、Hex、Oct、モーターの数が増えればそれだけお金が必要ですし、Octに至ってはコントロールボードも限られてきます。
ただし、この後にも書きますが、始めてマルチコプターを(できるだけ安価に)自作するという場合は、現時点(2012年12月)でフライトコントローラー(マルチローターコントローラーなどの表現もあります)は、個人的にKK2.0がおすすめです。これならOct(8Motor)まで使えます。
マルチコプターのサイズについて。
※サイズや通称について明確な基準はありません。
マイクロサイズと記載しているのはプロペラ径5インチ以下対向モーター軸間が10インチ以下を目安にしています。
室内で旋回までさせて~となるとMicroMulticopterサイズ以下が適当でしょう。
しかし、市販キットはかなり限られます。また、フレームそのものを自作で小さくしてもコントロールボードや受信機、ESC、バッテリー等の重量をしっかり受け止め、耐衝撃性まで備えたものを最初から作るのは、キビシイと思います。
経験的にはTurnigy micro-quadが自作マルチコプターフレームキットの最小サイズでしょう。
・・・市販フレームキットなら壊れないと言うことではありません。墜落させれば高度1mの高さからでも壊れます。
室内で3Dさせたい時はRTF(レディ・トゥ・フライ【すぐ飛ばせます】)やBTF(バインド・トゥ・フライ【送信機とバインドすれば飛ばせます】)と表記されている手乗りサイズ完成機にしておいた方が良いと思います。(本記事のタイトルにそぐわないのですが・・・)

ウルトラマイクロ(ultraMicro)と言われるサイズのものです。↑の画像のようなものです。
このクラスの機体は60~100gと非常に軽量で少々ぶつけたり落としたりしても壊れない事が多いです。
このところのマルチコプター流行で。海外のネットショップで安価に販売されていますが、送信機が電波法の認証を受けていないモノがほとんどです、一言で言うと「違法電波送信機」です。
これらのセットを購入する場合は、国内の信頼できるショップから国内で使用できる送受信機付きの機体(セット)を購入されますよう・・・。もしくは国内認定された送信モジュール(電波を発信する回路部分で国内認証を受けている物があります))でバインド出来る機体を入手するなどもあります。(一部受信機側からも違法電波を送信する機体もありますので注意してください)
話が少々脱線し表現が適切ではないかもしれませんが、海外のラジコン事情と日本国内のラジコン事情だけに目を向けると、非常に残念ですが、もはや取り残された感は否めません。
だからといって指をくわえて見ているのは管理人にはとても癪に障ります。
そこで、法規制を遵守しつつ、より手軽に楽しむことができるよう工夫していきたいと考えて居ます。
2,プロペラ、モーター、ESC選択
多くのショップでは機体(フレーム)とセット、もしくは推奨品として列記されることが多いと思いますし、それでもかまいません。
しかし、すこし調べてみると、その推奨品ではギリギリの出力(能力)だったり、実はESCのスペックをオーバーしてしまう事が容易に出来そうな組み合わせもあったりします。
モーターとESCは、実はマルチコプターの中で一番お金が掛かるところです(^0^;)
Quadでも4つOctなら8つも使いますから。Bicopterなら二つというつっこみは無しでお願いします。
プロペラの材質について
マルチコプターの人気で、逆回転(CW)プロペラも以前のプッシャータイプ機用しか見当たらなかった頃から、ずいぶんとラインナップが増えてきました。
グラファイト混合ABS樹脂、ローコストなABS樹脂のみ、ハイパフォーマンス用にカーボン樹脂などなど
管理人も様々なメーカーのプロペラを使ってみましたが、これもやはり適材適所という感じです。
初級、中級機で軽量な機体であれば,安価な柔らかいABS樹脂製で十分だと考えて居ます。
プロペラ強度が上がれば高回転、高出力時に「たわみ」が出にくく、効率も高くなります。
しかし、強度が上がれば、衝撃に弱くなり、有ってはならない事ですが、プロペラとの接触事故のリスクも上がります。
逆に、空撮用にカメラを搭載し、バッテリーも大容量なものを搭載するような機体では、柔らかいプロペラではプロペラのたわみ振動がコントローラーなどに影響することも考えられます。
このクラスになると、この記事そのものが適用しなくなりそうですね
機体(フレーム)の目星がついて、フレームの重量が概略でもわかったら、予定している受信機などの電装品とモーター+ESC各必要分などの重量を合計して飛行状態全備機体重量を想定してモーターを選定すると、後々の出費が抑えられるはずです。
ほとんどのモーターの説明に、thrust とかpullという表現で推進力が表示されています(そのときのプロペラのサイズも併記されていることが多い)ので、モーターの推進力の5~6割×使用個数≒想定重量を目安にすると良いと思います。
(;゚〇゚)ハッ、 モーターの回転数を示すKVですが、Multiコプターには通常スローフライト用プロペラを使うことが多いので、Microサイズでなければ800KV~2000KVが主流のようです。
推進力については、プロペラのサイズ、ピッチ、回転数である程度の机上計算ができます。
推力計算式はラジコン技術誌2006年6月の記事から引用。ただし、計算式最後の項目の数値(推力では22、電力では0.45)は、APCスポーツプロペラの係数になっているそうで、スローフライト用のプロペラは多少低回転域の推力や効率が増しているはずですが、まぁ、この時点では安全係数として見ておきましょう。
静止推力(g)=(プロペラ径÷10)^3×(ピッチ÷10)×(回転数÷1000)^2×22
消費電力(W)=(プロペラ径÷10)^4×(ピッチ÷10)×(回転数÷1000)^3×0.45
※単位:プロペラ径、ピッチはinch、回転数はr.p.m.、推力g(グラム)、電力W(ワット)
ついでにプロペラによって得られるピッチスピード(風速)の計算式は
【(P/10)×(N/1000)× 15.24】です。 単位(Km/h)
具体例で計算してみます。
管理人の所有機Talon Xコプター(全備重量≒800g)に使用しているパーツで計算してみます。

この画像の左上がTalon クアッドコプター Xモードです。
モーター=2822 1100KV
バッテリー=3S Lipo(定格11.1V) カットオフ直前の10Vで計算します(簡単だし(^0^;)
モーターのKV値×電圧=回転数
静止推力=(8÷10)^3×(4.5÷10)×(1100×10÷1000)^2×22
=0.512×0.45×121×22
=613(g)
8045プロペラを11000回転させるときの消費電力を計算します。
消費電力=(8÷10)^4×(4.5÷10)×(1100×10÷1000)^3×0.45
=0.4069×0.45×1331×0.45
=110(W)
モーターやESCの効率を考慮して1.25倍します(負荷効率80%として)
必要電力=110×1.25=137W
電流値=137÷10(V)=13.7A
ESCに定格12Aのモノを使ってる私としては、ちょっと困った数字になっちゃいました(*^▽^*)
まさにショップリコメンドの罠にはまっています(ノД`)
とはいえ、これでダメかというとそうでもありません。
モーター一つに掛かる必要推進力に余裕があるからです。
Talonの重量800gを均等にわればモーター一つあたり200gの推進力で静止、上昇するには静止加重の125%以上といわれているので目安として250gとしても十分な余裕があります。
ただし、フルスロットルを続ければ確実にESCが焼けそうですが・・・。
追記・モーターの最大出力が125Wと書かれていたので、モーターもギリギリ壊れそうです(^_^;)\(・_・) オイオイ
ラジコン技術の記事にもありますが、推力と電力の関係でいえば、低回転で大きいプロペラの方が効率が良いです。
しかし、今度はフライトコントローラーとの兼ね合いが出てきます。フライトコントローラーは応答性の良いプロペラ(要するに小径プロペラ)の方が安定すると明記されていますし、機械的にもそうだろうなと感じます。
こういったあちらを立てれば、こちらが立たずの関連性はどこの世界にもありますし、モーターやプロペラ、バッテリーの入手性、価格も含めた兼ね合いを自分で考えられるのも自作の楽しみです。
3,フライトコントローラーの選択
つい、先月(2012年7月)までは、安価なフライトコントローラーといえば、パソコンからファームウェアを転送しないと使えなかったり、機種タイプ別に固定の制御プログラムしか無いため、機体を変えたときは必ずファームウェアを書き換えなければならないと言うものばかりでした。
例.kkmulticopterのV5.5(通称blackboard)・HK multirotorconntolboardV2.1,V3.0等
(まぁ、。それはそれで楽しみだったりしますが(*^▽^*)
現時点では択一になってしまいますが、ホビキンのLCD付きFC kk2.0 がお勧めです。とりあえずパソコンを必要とせず、一般的に知られている機種(Quad4,Y6~octcopterなどなど)にも対応できるようです。
→ KK2.0 取扱説明記事はこちら ←
従来の3軸ジャイロ制御のFCでも十分にホバリング~ノーマルフライト~3Dまで出来ます。
しかし、万年初級者の管理人には、6軸(正しくは3軸ジャイロセンサー、3軸加速度センサー)制御は
また、multiwii系のFCには、GPS付きやGPSユニットをオプション接続出来るものもあり、マルチコプターの自動航行(定点ホバリングやゴーホームが有名ですね)は、とても魅力的です。
スイッチ1つでホームポジションに戻ってくる・・・。機首の向きが??になったときに慌てずHeadFreeモードにすればエレベーターは前後、エルロンは左右の操作になってくれる・・・等々
(もちろんFCが対応していればです)
AVRプログラミングの基礎知識が必要になるのと、当然のようにパソコンとの通信も必要です。
ややハードルは高いのですが、KK2.0などのFCの次のステップとして挑戦する価値は有ると思います。
最初からMultiWiiでも良いのですけど(^0^;)
金銭的に余裕のある方はDJIのGPS付きFCという選択肢もあります。
※DJI NAZAシリーズも設定にはパソコンなどの外部機器が必要です。
part1 END
2012/12/16 保守改訂
2013/01/05 保守改訂
2013/01/27 保守改訂
2013/03/07 KK2.0取扱記事へのLink修正
2013/04/02 見直し、加筆
(。・_・)ノ
↧
↧
木製クアッドフレーム改TRIコプター初の機体破損(^0^;)やっぱり!
ローコストマルチコプターの取りかかりでアーム1つ作成ミスしてしまったフレームの再利用として作成したY3コプター(Tricopter)です
やや風はあったものの日差しが暖かく、家人に運転をお願いして、屋外でコントローラー(MultiWii)の設定をしようと、ひとけの無い公園で調整飛行をしていたところ、バッテリーアラームは鳴っていないのに制御不能になって墜落。高度1m未満で草の生えた土の上でしたがテール側アームがボキっ・・・・アーム以外に損傷無し!?もちろんプロペラの変形もありません。
アームが折れることでその他の部品を壊さずに済んだ、と考えれて納得することに。
実際機体などの構造物は一定の衝撃を受けたときに「何が壊れて、何をできるだけ保護するか」という考え方がありますね。
まぁ、今回のように低高度でも墜落すれば折れますという見本のような状況です(^0^;)
この機体フレームの強度不足な点が明確に(制作時に補強しとけばよかった)なりましたので
現在補強案を検討中です。


ともかく修理する楽しみができました
フライトコントローラーの記事もそろそろ判ってきたことが多くなったので
近々記事を書きたいと思っています。
(。・_・)ノ
↧
マルチコプター(Tricopter)墜落の5分前・・・の動画(^0^;)
先に事故報告してしまいましたが、TricopterのTest風景の動画をごく短時間に集約してこうかいしてみました。
小さな軽い機体は緊張はしますが、怖くない感じで好きです。
ちょっと賑やかしに公開してみます(⌒∇⌒)
(。・_・)ノ
小さな軽い機体は緊張はしますが、怖くない感じで好きです。
ちょっと賑やかしに公開してみます(⌒∇⌒)
(。・_・)ノ
↧
SBEC(スイッチングBEC)についてちょっと考えてみた
いまさら感満載なのですが、このところMultiWii FCなどをいろいろ弄っていると、どうしても電気、電子回路の知識が必要だったりして、結果的に「制御系電源のノイズ」が気になっていました。
特にマルチコプターでは、いくつものESCを使用していますし、スイッチングBECについては、同一回路上に複数接続してはいけないという基本的な制限があります。
ノイズという面では、本来 直流のバッテリーからそのままICレギュレーターで電圧制御するリニアタイプの方が電源の品質は望ましいのですが、コスト面や大電流対応、高電圧対応などからスイッチングタイプが多くなっています。
さて、このスイッチングタイプの電圧コントロールは、電源を周期的にオンオフ(スイッチング)して、コンデンサで平滑化するわけですが、このコンデンサ・・・結構品質にばらつきがあり、十分に平滑化されていない事があります。(そもそもバッテリーという純直流をスイッチングするという時点で、ノイズレスとか考えて居るとは思えない管理人であります)
このスイッチングノイズが、そのままフライトコントローラーや受信機に流れることによって、思わぬ挙動を起こすことも十分に考えられます。
いままで、なんかおかしな挙動になることがあるのだけど・・・という場合はこの電源辺りもポイントになるかもしれません。
定格電圧16V2000μFほどの電解コンデンサを制御電源回路に付けるとかなり改善されると思います。
管理人の所有機でスイッチングBECを使用している機体にも取り付けてみる予定です。・・・いつになることやら![]()
ちなみにスイッチングノイズの波形はオシロなどの機器がありませんと計測できませんので管理人にはお手上げ~だったりします![]()
(。・_・)ノ
特にマルチコプターでは、いくつものESCを使用していますし、スイッチングBECについては、同一回路上に複数接続してはいけないという基本的な制限があります。
ノイズという面では、本来 直流のバッテリーからそのままICレギュレーターで電圧制御するリニアタイプの方が電源の品質は望ましいのですが、コスト面や大電流対応、高電圧対応などからスイッチングタイプが多くなっています。
さて、このスイッチングタイプの電圧コントロールは、電源を周期的にオンオフ(スイッチング)して、コンデンサで平滑化するわけですが、このコンデンサ・・・結構品質にばらつきがあり、十分に平滑化されていない事があります。(そもそもバッテリーという純直流をスイッチングするという時点で、ノイズレスとか考えて居るとは思えない管理人であります)
このスイッチングノイズが、そのままフライトコントローラーや受信機に流れることによって、思わぬ挙動を起こすことも十分に考えられます。
いままで、なんかおかしな挙動になることがあるのだけど・・・という場合はこの電源辺りもポイントになるかもしれません。
定格電圧16V2000μFほどの電解コンデンサを制御電源回路に付けるとかなり改善されると思います。
管理人の所有機でスイッチングBECを使用している機体にも取り付けてみる予定です。・・・いつになることやら
ちなみにスイッチングノイズの波形はオシロなどの機器がありませんと計測できませんので管理人にはお手上げ~だったりします
(。・_・)ノ
↧
マルチコプター 【MultiWii V2.2】 取扱情報(未完)
2013/05/17 午前4時35分公開
最新更新日 2013/05/18
MultiWii公式サイトの記事をメインに、管理人が知り得た情報について、随時更新していく予定の記事です。
(言い訳:情報量が多く一度に記事を「書き上げる」と思うと心が折れそうなので、少しずつ加筆しながら、実証を含めた検証結果なども反映させていきたいと思っています。)
公式サイトの記事は英文であり、ラジコン関連、その他専門用語が多く直訳では意味不明になりそうな部分も多く、管理人の経験を含めて意訳になっている部分も多々見受けられると思いますので予めご承知おきください。
また、管理人のブログ全ての記事において「記載の内容についての責任は負いません」
諸事情ご賢察願います。
前置きが長くなりました。失礼<(_ _)>
1、準備
・※後日
1,制御用プログラム(MultiWiiV2.2)のセットアップ
・MultiWii公式サイトよりファームウェアに相当するMultiWiiV2.2を入手して、使い勝手の良いと思われる場所に保存、展開します。
・arduino(制御ソフトプラットフォーム)をコレもやはり公式サイトから入手して、使えるようにしてください。
・パソコンとFCを接続する機器のドライバを入手し、FC~パソコン間の通信ができるようにします
・arduinoを実行してMultiWiiV2.2に同梱されている\multiwii\フォルダーにあるmultiwii.icoを
読み出し、所有機のタイプ、制御に必要な各設定を変更、設定します。
※後日
・arduinoから、設定変更済みの制御プログラムをフライトコントローラーのEEPROMに書き込みます。
※後日
・書き込みが完了したら、arduinoを終了し、コンピューターとFCの接続はそのままの状態で
MultiWiiV2.2の\multiwii config\というフォルダーの中にあるMultiWiiConfというCONFIGTOOLをパソコンの環境に適したフォルダーから実行します。
・Multiwii configの画面は以下のようなものです。(設定の数値はデフォルトではありません)
2013/05/17はこの画面の説明について簡単に説明します。

この画像では、レシーバーからの信号が無いため、「本当のRUN状態」ではありません。
「なんだか、すごい!」というのが管理人の最初の感想でした右下の部分に設定したマルチコプターのタイプとプロペラの回転方向、各アームの接続端子番号が明示されていますので、まずこれをメモなどで控えておきます。
この簡易モデル図が実際のモデルと異なる場合には、プログラムにミスがあるはずです。
再度プログラムの見直しをします。
設定値の変更などは、まだしなくても良いと思います。
(画像のPID制御値は管理人の所有機用にチューニング中の数値ですので参考になりません。)
上の画像のなかで「設定する部分」をすこし拡大して切り出したものです

【Low-mid-High】は3位置スイッチなどの場合ではポジションごとの3っの機能を割り付ける事ができます。
赤い角丸の資格で囲んだ項目が、arduinoのプログラム設定(config.h)にて規定された制御切り替え可能な項目です。機体制御モードの切り替えや各種センサーのオンオフを設定できます。
画像に有るこれらの項目は、管理人の使用状態のもので、multiwii FCで設定できる全ての項目ではありません。
※全ての項目についていったいどういう意味、動作をするのか・・・恥ずかしながら未だに100%の理解はしていません。
今回V2.2になって明確な情報のソースを見つけましたので、判る範囲で記録しておきます。
黄色い枠のマトリクスは、ハイライトしている部分は縦軸のスイッチの位置の時にどのモードやセンサーがONになるかを指定しています。
これは、パソコンの画面上でマウスを設定したいボタンでクリックすると、指定、解除が可能です。
【ARMING】
一般的にはスティック操作で行われます。緊急停止スイッチのようなDISARMINGを設定したい場合に使われるのでしょうか・・・
【ACRO】
項目にはありませんが、下記の2項目のどちらも選択されていない場合ACROモードとなります。
従来のGYROセンサー式フライトコントローラー(AutoLeveling(自動水平維持)機能の無いもの)の状態がイメージ的に一番近いと思います。
主に、各軸PID制御値の調整の時に使用するモードだと思います。
【ANGLE】
スティックを中立位置にしている状態では、AutoLeveling(自動水平維持)。
スティックの傾きに比例して機体が傾くという制御をします。スティックをフルに動かした状態で、機体はおよそ50度の角度まで傾き、スティックを離す(中立にもどる)と機体は水平に戻ります。
ここでの中立とはFCが受け取る信号がセンターという意味で、ACCセンサーの誤差を送信機のトリムで修正すると規定の動作が行われないことになる可能性があります。
センサーキャリブレーションを含め、無風ホバリング時のACCセンサーのトリム調整(FC側の設定)はしっかりと調整する必要があります。
【HORIZON】
新しいモードで、前記二つのモードをミックスした機体コントロールを行います。
スティックから手を離せば水平にもどり、スティックを大きく操作すればアクロフライトができます。
[BARO]
気圧センサー(高度計)による制御の要否を設定
機体の高度を維持するようになります。
(スロットル操作で割り込み可能)
[MAG]
磁気センサー(地磁気)による制御の要否を設定
この項目がONになると、ラダー操作を行わない限り機体のヨー軸(ラダー)方向を一定に保ちます。
風見鶏効果を打ち消します。
GPSを利用するオートパイロットモードにはこの項目は必ずONにします。
【HEADFREE】
電源投入時の機体の向きをベースに、フライト中の機体の向きには関係無くエレベーターは前進・後進、エルロンは左右の動きになります。
このモードでは前記[MAG]がONになっている必要があります。
[CAMSTAB]
カメラジンバル、マウント制御用サーボ出力の要否を設定
『GPSHOME』
GPSレシーバー搭載で測位が確立した場合に有効にできます。
(測位が確立できない地点ではスイッチを入れても動作しません)
最後にARM状態にした地点をホームポジションとして、オートパイロット航行します。
このモードでは通常、前記[BARO]。[MAG]をONにします。
(詳細は機会がありましたら記載します)
送信機からの操作は常時可能。(但し、ごく僅かな操作量では無効になるよう不感帯の設定もあります)
『GPSHOLD』
GPSレシーバー搭載で測位が確立した場合に有効にできます。
(測位が確立できない地点ではスイッチを入れても動作しません)
このモードをONにした地点に留まるようオートパイロット航行します。
このモードでは通常、前記[BARO]。[MAG]をONにします。
送信機からの操作は常時可能。(但し、ごく僅かな操作量では無効になるよう不感帯の設定もあります)
今日2013/05/18はここまでとさせていただきます(-_-)゚zzz…
2,機体への搭載、各配線接続
※後日
↧
↧
【マルチコプター空撮】Y6scorpion 二軸制御カメラマウントキット 作ってみました
マルチコプターのカメラを安定させるカメラジンバルのY6scorpion用アクセサリーパーツとして
販売されているものを購入、作ってみました。
ホビキンの割にまともな箱入りです(*゚∀゚*)
取扱説明書はオンラインPDFで入手して、印刷しています。

そして完成(サイドの形状)
正面から(機体にトリ釣る際には上部に発泡ウレタン製のような防振パッドが付いています。
写真には、すでにレギュラーサイズサーボ(別売)を組み込みしています。
このキットにはシャッターを押す為のサーボ取り付け用パーツが付いていますが、今回は使わないため取り付けていません。
カメラを取り付けるエリアは、奥行きが無く、小型ハンディーカムはちょっとキビシイ感じです。
最近安価で高画質動画も撮れるコンパクトデジタルカメラにターゲットを絞っているのでは?
という印象を受けます。
※SONYのミラーレスなんかドンピシャサイズなのですが・・・・
参考までにGOPRO HERO3 BKエディションを取り付けるとこんな感じになります。
このキットにはシャッターを押す為のサーボ取り付け用パーツが付いていますが、今回は使わないため取り付けていません。
カメラを取り付けるエリアは、奥行きが無く、小型ハンディーカムはちょっとキビシイ感じです。
最近安価で高画質動画も撮れるコンパクトデジタルカメラにターゲットを絞っているのでは?
という印象を受けます。
※SONYのミラーレスなんかドンピシャサイズなのですが・・・・
参考までにGOPRO HERO3 BKエディションを取り付けるとこんな感じになります。

機体取り付け部分よりカメラの上部が高いのですが、これは機首側のスペースに突き出た位置になるため問題ありません。
このカメラジンバル2軸制御サーボが標準型と言うこともあり、miniサーボ指定のH.A.L用3軸カメラジンバルより壊れにくい感じがします。(まぁ、墜落すれば壊れます)
さて、これを取り付ける機体(Y6scorpion)の方は、といいますと、まだ、製作途中です。
モーター、アンプなど悩みどころ満載ですが、初夏の風に負けない安定した空撮機を作りたいと思っています。
(。・_・)ノ
↧
マイクロサーボ 無負荷時(サーボ単体)の消費電力を測ってみた
先日、マルチコプターのBEC(スイッチングBEC)について考えて見たときに、サーボの使用電力について、間違ってないか不安になってしまったので、Testしてみました。
被測定サーボは、GRATT製 9gマイクロサーボ
測定条件
サーボテスター設定
ワイパーモード
振幅:25 スピード:15 ※この数値はサーボテスターの設定値ですので単位は不明
(目視上かなり早くワイパー動作するという感じ)
測定時の状態写真
すこし文字が読みにくいですが
上から
電流:0.18A
電圧:4.89V
電力:0.9W
最大電流:0.21A
最小電圧:4.81
設定がかなり激しく動く状態としてあり、無負荷で0.21Aの電流が記録されました。
ちなみにこのテスター、電流値をロギングしてグラフ表示までできてしまうというオマケ?もついています。
そういえば、![]() この測定器の入・出力ピン配列とコネクターの向きが、一般的なものと逆?(信号線とマイナス(-)の配置)・・・サーボテスターのピン配列は一般的なものなので、この測定器に付属のリードをそのまま使うと故障してしまう可能性があります。(FUTABA型コネクタ)
この測定器の入・出力ピン配列とコネクターの向きが、一般的なものと逆?(信号線とマイナス(-)の配置)・・・サーボテスターのピン配列は一般的なものなので、この測定器に付属のリードをそのまま使うと故障してしまう可能性があります。(FUTABA型コネクタ)
釈迦に説法かもしれませんが、念のため(^_^;)
※サーボのコネクターは汎用タイプなので極性に注意して無加工で接続しました
後日カメラジンバルに取り付けて、カメラを載せた状態でTestしてみようと思っています。
To be Continue
(。・_・)ノ
被測定サーボは、GRATT製 9gマイクロサーボ
測定条件
サーボテスター設定
ワイパーモード
振幅:25 スピード:15 ※この数値はサーボテスターの設定値ですので単位は不明
(目視上かなり早くワイパー動作するという感じ)
測定時の状態写真

すこし文字が読みにくいですが
上から
電流:0.18A
電圧:4.89V
電力:0.9W
最大電流:0.21A
最小電圧:4.81
設定がかなり激しく動く状態としてあり、無負荷で0.21Aの電流が記録されました。
ちなみにこのテスター、電流値をロギングしてグラフ表示までできてしまうというオマケ?もついています。

そういえば、
この測定器の入・出力ピン配列とコネクターの向きが、一般的なものと逆?(信号線とマイナス(-)の配置)・・・サーボテスターのピン配列は一般的なものなので、この測定器に付属のリードをそのまま使うと故障してしまう可能性があります。(FUTABA型コネクタ)釈迦に説法かもしれませんが、念のため(^_^;)
※サーボのコネクターは汎用タイプなので極性に注意して無加工で接続しました
後日カメラジンバルに取り付けて、カメラを載せた状態でTestしてみようと思っています。
To be Continue
(。・_・)ノ
↧
【マルチコプターFC】MultiWii FC 関連情報 (随時更新予定)
最終更新日 2013/05/26
MultiWii フライトコントローラーを使用するにあたっての情報と
ファームウェア(arduino sketch)。Config toolの情報を記録しておきます。
なお、これらのプロダクトのほぼ全てが善意のプログラマーと多くの支援者によって開発されています。いずれも募金は受け付けていますので、余裕のある方は是非
全て自己責任において使用されることが前提です。
arduino 現行バージョン
2013/03/16時点 V1.0.4
2013/05/26時点 BETAバージョン1.0.5が公開されていますが、一般ユーザーはBETA表記の無い安定バージョンの使用をお勧めします。
MultiWii V2.2が公開
2013/03/16 管理人は未検証
2013/05/26 一般的に言うBETAバージョンのDEV_2013_06_08が公開されていますが、一般ユーザーはBETA表記の無い安定バージョンの使用をお勧めします。
MultiWiiGUI:windows専用としてGUI(グラフィカルユーザーインターフェイス)config toolが公開されている。
※注意※multiwii dev*** との整合性がとれているとは考えられない。(管理人の環境下では適切に動作していない)
2013/01/21時点 最新V2.1
2013/03/16時点 V2.2beta testing Version
2013/05/26 4/1にV2.2正式バージョンが公開されています。
以下情報源、ダウンロードサイト Link
→arduino:ダウンロードページ
とにもかくにも、現時点ではこれが使えないとFCを使えない?というプログラミングツール
→MultiWii:ダウンロードページ
FC制御プログラムのソース(sketch)と、FCの設定を行う【config】(PC上で利用するFC各種設定ソフト)がセットでダウンロードできます。
2013/03/11 MultiWii V2.2が公開されました。
→MultiWiiGUI:ダウンロードページ
以下はFC個別の情報ソース
MultiWii on HK MultiWii Mega Board WITH MTK 3329

;ここの情報ではMultiWii dev version r1240となっている。
V2.2にて正式に不整合部分は解消されているようです。
MegaPirate NG on HK MultiWii PRO Flight Controller w/MTK GPS Module
multiWii PRO に Megapirate NG を適用する方法
MultiWii FC周辺ボード(shield)取扱ショップ
オンラインショップ
・RC Timer:
multiwii FC GPS-I2C インターフェイスボードなど各種取扱されています。
商品の梱包、発送のタイミングなど、これでいいのか?とびっくりするような事もありますが
とりあえず管理人は割り切って購入しています。
※このショップで販売されているBluetoothアダプターやテレメトリ通信機器、FPV関連機器は日本国内で使用(電波の送信)すると違法になるものがあります。
(^O^)v
↧
空撮を練習の予定が、強風で「ほぼ墜落」やってしまった(T-T)
先日友人に教わった場所(ロケーション)がMultiコプターの練習にうってつけだったので、機体の仕上げ調整とカメラジンバルの振動対策をしようと出かけたのですが
風が強く迷ったのですが、重量機だし、これぐらいの風なら・・・と、自分に都合の良い判断をしてしまい。結果、ありがちなハードランディング以上墜落未満という結果になってしまいました。
撮影した動画も、フライトビデオと呼ぶにはおこがましいものですが、自戒の念も込めて
アップロードしました。
機体はHAL QuadP(+)、Multiwii 2.2、HAL用3軸カメラジンバル
今回の件で破損した部品はとても少なかったのですが、自分の操縦の未熟さや、機体回収時に、機体は友人が発見回収してくれたのですが、よせば良いのに、私は足が不自由くせに草むらの中を探し歩いていて2回ほど転倒してしまい精神的にギブアップしそうになっています。
やはり、いろいろと無理なのかな・・・と。
うーん
・・・
・・
(。・_・)ノ
風が強く迷ったのですが、重量機だし、これぐらいの風なら・・・と、自分に都合の良い判断をしてしまい。結果、ありがちなハードランディング以上墜落未満という結果になってしまいました。
撮影した動画も、フライトビデオと呼ぶにはおこがましいものですが、自戒の念も込めて
アップロードしました。
機体はHAL QuadP(+)、Multiwii 2.2、HAL用3軸カメラジンバル
今回の件で破損した部品はとても少なかったのですが、自分の操縦の未熟さや、機体回収時に、機体は友人が発見回収してくれたのですが、よせば良いのに、私は足が不自由くせに草むらの中を探し歩いていて2回ほど転倒してしまい精神的にギブアップしそうになっています。
やはり、いろいろと無理なのかな・・・と。
うーん
・・・
・・
(。・_・)ノ
↧
↧
【マルチコプター】KK2.0PI制御値チューニングについて
最新更新日 2013/06/05 全面的に改訂
RCGroupsのスレッドでHK KK2.0 フライトコントローラーについての説明とQ&Aが有りましたので、備忘録的翻訳メモを記載します。
こちらの記事にあるチューニング開始時の各設定数値はファームウェアV1.3以前(V1.3はバグが存在するため事実上V1.2)に適応します。
ファームウェアバージョン1.4以降制御アルゴリズムの変更によりPI制御値が変わりましたのでご注意ください。
現行バージョンV1.5用に各項目、表現を管理人の機体調整時の数値、表現に変更2013/06/05
元スレ記事の内容とは異なる数値、翻訳はかなり意訳になっていますので、しっかりと内容を把握したい方はスルーされた方がよいと思います。
お約束:本当に自己流メモです、元ネタのスレッド誤訳とか有ると思います。最後部なんかGoogle翻訳そのままだったり。管理人の行っている方法、考え方なども反映しています。
ということで、内容について一切の責任は負いません。あしからず<(_ _)>
管理人は、PID制御値のチューニングを行う場合、SelflevelingはOFFとして、制御値の干渉を避けて行います。従いましてホバリングができるコンデションになるまで、送信機のトリム、FCのキャリブレーション、その他調整を十分に行っています。
※調整を行う際には周囲の安全確保を最優先にしてください
ロール/ピッチ P(比例制御)チューニング:
次の値にゲイン(Gain)とリミット(Limit)を設定します。
ロール/ピッチ P ゲイン:30(スパン25センチメートルほどの小さい機体は20に設定)
ロール/ピッチ P リミット:70~100
ロール/ピッチ I ゲイン:0
ピッチ/ロール I リミット:20
ヨーPゲイン:50
ヨーP リミット:20
ヨーI ゲイン:0
ヨーI リミット:10
上記初期値からホバリング状態で、送信機のスティックを短じかく速い動きでロール/ピッチスティックを動かし機体の応答性、挙動を確認します。
調整を進める場合、一度に5~10(小型機の場合は5以下)でロール/ピッチPゲインを増やします。
ゲインを増やしていくと、次のような状態を感じるはずです:
1:航空機スティックの動きに速く反応するが、操作量以上の動きになり、不安定な挙動になる。
2:航空機は、通常でも短時間、発振、振動することがあります。振動が収束されれば問題ない。ただし、継続的に発振、振動する場合はゲインが高すぎる。
3:タッチダウン時に航空機が地面(床)から跳ね返されるように動き、着陸が難しくなる。ゲインが高すぎ
4:航空機がスロットルを操作していないのに上昇してしまう。ゲインが高すぎ
テストを繰り返し、航空機はスティック操作に追従して、発振、継続的な振動や、スロットルを操作していないのに上昇してしまう事がない状態がPゲインの適当な値と言えます。
ロール/ ピッチ I(積分制御) チューニング:
飛行姿勢を維持するか・・・というテストのため、かなりな飛行距離を必要とします。
管理人にはそんな環境有りません(^0^;)
1:機体を水平に保持します。
2:ロール/ ピッチいずれかのスティックを素早く操作し、ニュートラルに戻します。
機体が自然に水平に戻る場合、Iゲインを増やします。
機体の姿勢(傾き)維持される場合は、Iゲインは良好です。
チューニングテストフライトの代わりにIゲインをPゲインの50~100%に設定するという方法も・・・。
Iゲインが高すぎる場合、Pゲインが高すぎる時の発信、振動よりもややゆっくりした周期振動が起こります。
ロール/ピッチ P(比例制御)チューニング調整が完了した後
ヨー/ラダー P - チューニングを行います。
一度に5~10(小型機では5以下)ヨーPゲインを増加させ、ホバリングして航空機の応答をテストします。
ヨー(ラダースティック)を操作し、およそ60°~90°機体の向きを変えスティックを中立に戻します。
ゲインを増やしていくと、次のような状態を感じるはずです:
1:航空機の素早く追従し、速く停止します。
2:航空機のオーバーシュート少ない。
2:航空機がスロットルの操作無しに上昇や下降する。
航空機が追従性が良く、オーバーシュートが最小で、上昇や下降しない状態が、Pゲインの適当な値です。
※機体の特性として、全てのモーターが同一方向にレイアウトされた一般的なマルチコプターではYow軸の反応はやや緩慢になります。Y3,Vテール機は比較的素早く動きます
ヨー/ラダー I -チューニング
一度に5~10(小型航空機用の5以下)でヨー I ゲインを増加させる、上記と同じテストを行う。
航空機のオーバーシュートがほとんど無ければ、Iゲインは適当です。
あるいは、ヨーPゲインの100%に設定します。
あなたの機体が小さく危険性が極めて低い場合は、ヨー軸まわりのゲイン値はデフォルトのままで良いかもしれません。
そうでない場合(大型機など)場合は増加、チューニングしてください。
これ(ヨー軸のI-ゲイン)は、一般的にゲイン値を低くめに維持するほうが良いです。過度のゲインは、振動および制御の問題を引き起こす可能性があります。
最後に(by管理人)
※SelflevelingをONにしたフライトがメインの場合、最適値を追求する必要は無いのではと考えて居ます。ややゲインが低めで「ちょっと鈍いかなぁ」と感じる程度で機体操縦の練習をして、Selflevelingをoffにしたフライト(3Dアクロなど)を行う頃に再度制御値の調整、追い込みを行うという流れで良いと思います。
・・・SelflevelingONでもフリップ、ループなどはできるようですので誤解なきよう。Stick Scalingの調整は必要かと思いますが。
機体の安定性はFCの制御値もありますが、フレーム構成、モーター、ESC等の個々の部品性能、組立精度、その他機体全ての要素が関連するものですし、それは個性とも言えます。制御値にあまりこだわりすぎないというのも一つの楽しみ方だと思います。
~~~以下元スレッドに記載のあった記事で、参考になりそうな部分~~~
Q&A:(テキストの一部は、このスレッドで他のユーザーの記事から引用したものです。)
直接関係しそうな、興味のある項目のみ記載します。
Q:"PIエディタ"で"Limit"の値とは何ですか?
:"Limit"の値について。補正(制御)のために使用される使用可能なモータ電力の最大値を設定します。 100は100%を意味します。PID理論的には"アンチワインドアップ"として知られています。
Limitはヨー軸制御で大きなヨー補正によるモーター飽和状態(フルまたはnoスロットルを与える)を防ぎ、ロール/ピッチ軸の制御不能を起こさないためにも最も重要である。
デフォルト値は、最も重要なロール/ピッチ軸制御のための70%が利用できるように、ヨー補正に使用可能なモータ電力を30%( "P Limit" 20+ 10 "I Limit")としています。
ここから~~~~~~~~~
ヨー軸の応答性を高める為に、"ヨーPリミット"を増やすことはできます。ただし、ヨー応答も機体自体によって制限されていることに注意してください。
姿勢を変化させ、または何らかの要因で変化した場合、元の姿勢に戻すことができる限界、つまり、ヘディングホールド状態の時増加した"メモリ"(モーター制御演算値)が"ロール/ピッチ/ヨーI Limit"によって演算不能にならない程度まで。
急激な姿勢変化(曲技飛行など)を与えると姿勢制御のために内部処理数値(モーターの演算出力値と思われる)がブローアウト(演算可能数値域を逸脱)してしまう事があり得ます。大きすぎるモーターへの演算出力値は問題を引き起こす可能性があります。
~~~~~~~~~~~~ここまでは本当に推測で書いてあります。まぁ、なんとなくこんな感じかな程度のメモです。
あなたがこれらの条件を理解している場合を除き、デフォルトのLimit値のままにしておきましょう。
デフォルト値は、PIチューニング·プロセスには影響を与えません。
またselfl evelingの"I-ゲイン"と"I Limit"はゼロです。self levelingのアルゴリズムのI の部分がうまく機能しません、これは後に修正される予定です。 (加速度が遅すぎる)・・・・ファームウェアアップデート(V1.2)でこのself levelingのI Gain/I Limit設定の項目は無くなりました。
Q:どのように低電圧アラーム動作しますか?私は、入力Vのいずれかの接続を参照してくださいできないのですか?
:バッテリーの電圧入力が黄色コンポーネントの左のスルーホールがあります。バッテリー+からこの穴にケーブルを接続します。グランド·リターンは出力#1のアース線です。しきい値を設定する:"アラーム1/10ボルト""その他の設定"に進みます。それは、1/10 ボルトでそう10.5Vが"105"と入力されています。バッテリ電圧が下限を下回ると、LVCにのみアクティブになります。それが上記の状態になるとき、それは停止します。また、ビープ音が速くなり、より低い電圧は以下の制限です。
↧
PR: 【試乗会開催】ボルボ 60シリーズ R-DESIGN
 |
| 今なら、ご試乗・査定をされた方に素敵なプレゼントを進呈! |
↧
【マルチコプターFC】HK KK2.0 取説 自己流翻訳
最新更新日 2013/06/05 低電圧アラームに関する事項、BEC電源に関する事項追記、改訂
本記事は「非公認取扱説明記事」ですので、ここに記載の通りにならなくても責任は負いません。
管理人が店長をしていますオンラインショップ 「ホビーショップ雅夢」 でファームウェアV1.5へのアップデート済みKK2.0を取り扱っています。
HobbyKing KK2.0マルチロータ·コントロール·ボード(以下、文中ではFCと記載)
User Manual ユーザー·マニュアル
レイアウト:
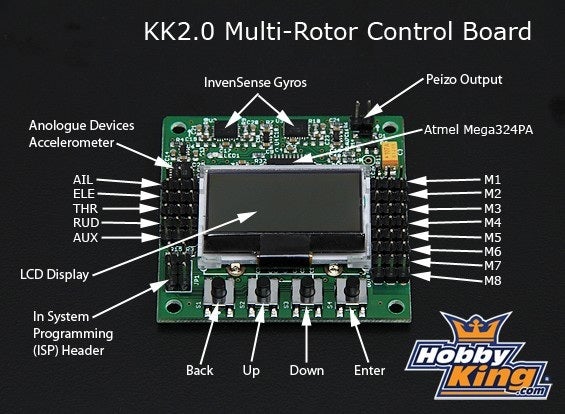
初期設定:
液晶画面上をフロント、ボタン側をリアになるようフレームにFCをマウントします。
(上の画像では上がフロント、下がリアになるように搭載します)
左側の端子にレシーバーを接続します。 FCの端(基板端面)側にマイナス(黒色または茶色)リードがくるようにします。
順序は、前から後に、次のとおりです。エルロン(A)、エレベーター(E)、スロットル(T)、ラダー(R)、AUX。
FW1.2にてCPPM機能が搭載されたので、入力の順序を入れ替えることが可能になっています。ただし、未検証です送信機のスイッチチャンネルをAUXに接続します。(一般的にはGearスイッチ5chでしょうか・・・)
右側のピンにモーター(ESC)またはサーボを接続します。
前からM1、M2・・・・、M8となります。 FCの端側にマイナス(黒色または茶色)リードが来るように。
FPV用カメラジンバルのスタビリティ出力P/R軸が出来るようになりました。
この場合、ESC出力は6点まで出力チャンネルの7chがロール軸、8chがピッチ軸コントロール用サーボ出力になります。(FW1.5からただし、未検証です)
カメラジンバルスタビリティを使用する場合は、MENUモード画面からCamera Stab Settingsの項目のPitch、Rollの各Gainを0以外にします。これにより出力チャンネル7,8にスタビビリティ信号(サーボ用)が出力されます。
制御値のsettingはゲイン値500からを推奨
サーボの動作方向を変えたいときは、ゲイン値をマイナス(-)にします。(例.-500)
モーターのレイアウトについては下記を参照してください。
まだプロペラを取り付けないでください!
出力側M1~M8チャンネルの電源について
M1コネクタは常にESC(5V BEC)が接続されている必要があります。このESCはFCに供給する唯一の5V電源になります。M2~M8の電源から独立しています
これによって、FCは安定した電源を確保します。
(このFCの電源電圧は4.7V~6Vと商品説明に記載されています。)
※低電圧アラームのマイナス(Return)はM1コネクタのマイナスに接続されています。FCの低電圧アラーム機能を使用する場合は上記画像右上PIEZO OUTPUTのすぐ近くにある基板のスルーホールに監視する電源の+極側から配線接続(ハンダ付け必須)します。スルーホールへはピンをハンダ付けしてピンコネクタで配線をお勧めします。上記より追加配線はプラス側1本だけで機能します。
M2~M8の5V電源ピンは互いに接続されており、ここに接続されるすべてのサーボなどの給電を必要とする機器は、M2~M8ここに接続されているESC(BEC)によって供給されます。
※重要※
M2~M8への給電に電圧の異なるものや複数のスイッチングBECを同時に接続しないでください。
ご使用になるESCのBEC仕様を確認してください。
一般的に市販されている2~3SLi-Poバッテリー用ESCに搭載されているBECは、LinearBECが多くLinear(リニア)BECの場合、単に「BEC」と表示されているケースが多いです。
スイッチングBECは、主にSBEC、U-BEC、UBECという表記がされているようです。
(必ずしもこういう表記になっているとも言えません、正確にはESCの取扱説明、仕様を確認してください)
多くのサーボを使用するとき、例えば、カメラジンバル制御やBiCopter等、十分な容量のBECを接続する必要があるかもしれません。
KK2.0を飛行機の姿勢制御に使用する場合はファームウェアV1.4公開時に
飛行機用ファームウェアが提供されていますので、そちらの使用をお勧めします。
本記事はマルチコプター用として公開、提供されているファームウェアについてのみ
更新改訂の予定です。
ファームウェアのアップデートの際にUSB-ASPアダプタを使用する場合、こちらのこちらのサイト【fischl.de】で提供されているドライバをインストールする必要があるかもしれません。上記サイトで提供されているファイル形式はやや特殊な圧縮ファイルですので、わかりにくい場合は検索サイトで「USBASP ドライバ」などで検索するとよいかもしれません。
また、ファームウェアの書き換えについては、管理人の調べた中で、フリーウェアでかつ、管理人のようにプログラム(ファームウエア)のソースコードなど読めないユーザーが使用できるのは【KKmulticopter Flash Tool by LazyZero】しか見当たりません。
(このツールは、こちらの→KKmulticopterサイト←のページ
左側MENUでKKmulticontrollerページSoftware Resourcesの中にあります)
2013/04/01確認済み
※ファームウェアのアップデートは、それほど難しいものでは有りませんが、いずれも自己責任において使用されるソフトウェアです。ご注意ください。
送信機に、通常の飛行機のプロファイルを使用し、新しいモデルをセットアップします。
各チャンネルのミキシングは基本的に不要なため、誤動作を避けるために飛行機用という指定をしていると思います。と思っていましたが、マルチコプターの特性、ブラシレスモーターの特性として、アイドルアップや、スロットルカーブカスタマイズを考慮すると飛行機用にこだわる必要は無いと思います。
電源を入れて、メニューボタンを押し "レシーバ·テスト"サブメニューを入力してください。
送信機の各チャンネルを動かし、スティックの動きと各項目の表示方向が合っていことを確認してください。
同期していない場合は、送信機のチャンネルを反転させます。
送信機のスイッチ(AUXチャンネル)をチェックして、 "ON"になるよう、送信機のAUXチャネルを反転させます。
トリムまたはサブトリムを使用して、LCDに表示チャンネルの値をゼロに調整します。(AUXを除く)
"Load Motor Layout"
サブメニューを入力し、必要な構成を選択します。必要なコンフィギュレーションが表示されない場合は、 "mixer editor"(ミキサーエディタ)サブメニューを使用して設定します。これについては後述。
"Show Motor Layout"
サブメニューを入力し、次の点を確認します。設定は正しいですか?モータやサーボは正しい出力が接続されていますか?正しい回転方向ですか?
それがマウントされているアームを下げたときにモーターがスピードアップしていますか?
"PI Editor"
サブメニューを入力し、正しいPIゲインの値を確認してください。既知の良好な値またはデフォルトのものを使用します。(デフォルト値は最後部に記載があります)
-今、あなたはプロペラをマウントし、それをテストすることができます。
あなたは地面にmulticopterをおいて、5メートルの距離をおくまで、アーミングにしないでください。
スロットルをゼロ、ラダーを右いっぱいに数秒保持することによってそれをアーミング状態にできます。ビープ音が鳴り、LEDが点灯します。
スロットルをゼロ、ラダーを左いっぱいに数秒保持することにより着陸後はアーミング解除(SAFE)にします。 ビープ音がしてLEDがオフになります。
あなたがmulticopterに達する前にアーミング解除してください。
アーミング後すぐに転倒した場合は、各部の接続とカスタムメイドのミキサーテーブルを確認してください。
揺れたり、離陸後に揺れる(シェイク)する場合は、ロールとピッチのPgainの値を下げて調整します
離陸、ホバリングが容易になるよう、調節してください。(日本語に表現するのが難しいので原文を転記)
If it shakes and maybe climbs after its airborne, adjust the Roll and Pitch Pgain down.
if it easily tips over after its airborne, adjust up.
前後左右にドリフトする場合は、ドリフトを抑えるためにトリムを使用します。
通常、風によってドリフトします。
過度のトリムが必要な場合は、アームとモーターが正しい角度を持っているかどうか、モーターが良好であることを確認してください。
上下にピッチングせずにまっすぐに飛ぶ範囲で、ロールとピッチの I ゲイン(Pゲインとの違いに注意)を増やしてください。
それをアーミングまたは武装解除しながら右にエルロンを保持することによって
セルフレベリングをオンにします。
左エルロンを保持することによって、それをオフにします。あるいは、
AUXチャンネルにこれを割り当てることができます。下記を参照してください。
管理人追記 スティック操作でのSelflevelingのスイッチは出来なかった。
selflevelingを操作するには、FCの設定で常時ONもしくはAUXスイッチが必要
サブメニューの説明。
"PI Editor"
ここでPIゲインの設定を調整します。変更したいパラメータを強調表示し、[Prev]および[Next]ボタンを使用して、[change]ボタンを押してください。
ロールとピッチの両方を同時に調整するには、 "モード設定" サブメニューを参照してください。
"Receiver test"
:レシーバからの出力を確認してください。
このレシーバーテストいろいろ応用が出来て良いです。
送信機、受信機をカスタム(市販のセット売りでは無い組み合わせ)に組み合わせるとき、送信機のゼロポイント(エルロン、エレベーター、ラダーなどでは中立位置、スロットルは最スロー)が受信機から適正に出力されているかをデジタルで確認することが出来ます。
管理人のように安物プロポ(失礼)安物受信機(これまた失礼)では、PPM信号の特性が変わることがあるため、組み合わせの良否判定や、不具合の有った場合の修正目安としても使えます。(もっとも、本当はオシロスコープが欲しいのですが・・・)
"Mode Settings"
"Self Level" : セルフレベリング機能のオンオフを、どのように制御するか。
-- "Stick":武装や武装解除時に右にエルロンを保持することによってセルフレベリングをオンにします。左にエルロンを保持すると解除します。
-- "AUX":AUXスイッチチャンネルによってセルフレベリング機能を制御します。
"I part of PI":heading-hold機能が制御される方法:
-- "ON":常にオン。
-- "AUX":AUXスイッチチャンネルは、heading-hold機能を切り替えます。
FW1.2にて項目削除
"Arming":アーミング機能を制御する方法:
-- "Stick":フル右ラダー、ゼロスロットルでアーミング。 フル左ラダー、ゼロスロットルでアーミング解除(SAFEモード)。
-- "ON":常にオン。この設定を使用するには注意を要します。 この設定は飛行機の安定化のためだけにFCを使用するとき等に使います。
"Link Roll Pitch":
-- "ON":ロールとピッチゲインパラメータのどちらかを編集しても、RollとPitch両方の設定値を同じ値にします。
-- "off":個別にロールとピッチゲインパラメータを編集します。multicopterがRoll軸とエルロン軸に異なる慣性質量を持っているときに使用します。
"Stick Scaling"
:ここでは、スティックからあなたの好みへの応答を調整することができます。数値が高いほど、より高い応答を与えます。送信機のエンドポイントまたはボリューム調整に似ています。また、スティックのレスポンスを調整し、さらに応答が必要な場合はスティックのスケーリングを使用するように送信機を調整することができます。
"Misc. Settings"(その他の設定)
- "minimum throttle(最小スロットル)":デフォルト=10 スロットルがゼロであるときに接続されているすべてのモーターが停止を保持するのに十分なだけ高く調整します。
- "LCDコントラスト":LCDのコントラストを調整します。FW1.2にて項目削除
-"height Dampening":
-"height D. Limit": 30
-"alarm 1/10 vltage":
-"servo filtter":デフォルト=50
"Self Level setting":自己水平維持機能についての設定をします。
- "Self Level Gain":セルフレベリングのパワー。数字が大きいほど強力です。
- "Self level Limit":セルフレベリングの最大パワーを制限します。数字が大きいほど、高いLimitになります。
*FW1.4でのデフォルト設定値はGain:100 Limit:20 となっています。
*ACC(selfleveling)時のロール、ピッチ方向のトリムが行えるようになった。
-"ACC Trim Roll":デフォルト=0
-"ACC Trim Pitch":デフォルト=0
“Camera Stab Settings”:カメラマウント(ジンバル)二軸制御
出力チャンネルの7chがロール軸、8chがピッチ軸コントロール用サーボ出力になります。
-“Roll gain" :デフォルト=0
-“Roll offset" :50
-“pitch gain" :デフォルト=0
-“pitch offset" :50
"Sensor Test"
:センサーからの出力を表示します。すべてのチャンネルが "OK"かどうかを確認します。FCを傾かせたり動かして、その数値の変化を参照してください。(変化してればok程度のもの)
"Sensor ACC Calibration"
LCD上の指示に従ってください。キャリブレーションは、初期セットアップに一度行う必要があります。
ファームウエアバージョンアップで初期化される事が多いので、管理人はバージョンアップしたらキャリブレーションし直すことにしています。
"Esc Calibration" FW1.2以降にて4,5項目の手順が「やりやすく」なりました。
手順:
1:重要:プロペラを取り外す、またはモーターリード線を外して、危険の無いようにしましょう!
2:FCの電源をオフにします。
3:送信機の電源をオンにし、最大にスロットルを設定します。
4:ボタン1と4を押し、最後のステップまで押し続けます。途中でボタンを離すと、キャリブレーションを中止します。FW1.2から、機体FCのバッテリーを繋いでから素早くこのボタンを押せばキャリブレーション状態になるように変更されました。
5:FCの電源をオンにします
6:ESCのビープ音を待ちます、フルスロットル信号が校正されています。 数秒かかりESCに依存しています。
7:アイドルにスロットルを下げます。
8:ESCからの[アイドルスロットル]キャリブレーション信号を待ちます。
9:ボタンを放します。
"CPPM settings":入力ch(レシーバーとの接続ch)の定義を変更出来る。
-"Roll":デフォルト=1
-"Pitch":デフォルト=2
-"Throttle":デフォルト=3
-"Yaw":デフォルト=4
-"AUX":デフォルト=5
"Mixer Editor"(この項目は十分な知識を持った上で設定されると良いと思います、一般的なフレームキットを使用している場合には、設定の変更は必要無いと思います)
多機能であるがゆえに設定のこつが必要です。
このメニューでは、どこのモーターがスティックやセンサーから取得した信号に対して影響するかを設定することができます。
これは、最大8個のモータやサーボに対して、任意の構成(レイアウト)を可能にするためです。
設定する出力チャンネル(1~8)を変更するには、右上の番号がハイライト表示されたら、”Change”を押します
- "スロットル":スロットルコマンドの量。出力チャネルがESCに接続されている場合通常100%。
- "エルロン":エルロン/ロールコマンドの量。ロール軸の右側にあるモーターの値は正、ロール軸の左側に負の数値を使用します。値は、ロール軸からモータまでの距離によって与えられる。数値が大きいほど遠い。
- "エレベーター":エレベーター/ピッチコマンドの量。ピッチ軸の後ろ側のモーターに正の、ピッチ軸のフロント側のモーターは負の数値を使用します。値は、ピッチ軸からモーターまでの距離によって与えられる。数値が大きいほど遠い。
- "ラダー":ラダー/ヨーコマンドの量。通常100%。 CCWプロペラには正の、CW回転プロペラには負の数値を使用します。サーボの動作方向も同じように正、負を入れ替えることでジャイロ動作方向を入れ替えできます。
- "オフセット":チャンネル出力に一定のオフセットを適用します。出力チャンネルにESCが接続されている場合は、必ず 0(ゼロ)とします。
サーボを接続している場合は約50%にします。この値を調整することによってサーボの位置を微調整できます。(ニュートラルポイントの微調整)
- "タイプ":チャネルに接続されているタイプ(サーボやESC)に設定します。
-- ESCの場合:PWM出力レートは常にHighです。SAFE状態やスロットルがアイドル状態ではゼロを出力します。ARMING時にスロットルがゼロの時、前記の "その他。設定"サブメニュー "最小スロットル"の項目を適用します。
--サーボの場合:PWM出力レートがハイレベルまたはローレベルにすることができます。オフセット値は、SAFEモードやスロットルがアイドル状態にあるときに出力されます。(通常サーボセンターと呼ばれる50%にします)
- "レート":ESCまたはデジタルサーボのための高レート(400Hzの)、またはアナログサーボのための低レート(80Hzの場合)。
"Show Motor Layout":グラフィカルに構成を示しています。ビルドおよび/またはあなたのカスタムミキサーテーブルをチェックするために使用します。
"Load Motor Layout":多くのプリセットレイアウトのいずれかをロードできます。ロードされた設定は、後で変更することができます。
ファームウェアデフォルトへのリセット
PI 制御の設定については、FW1.2にて提示されたチューニングガイドのこちらの記事を参照ください。
以下 旧バージョンのチューニングガイド
1:KK2は、送信機のスロットルスティックがニュートラルになっていることを確認してください。 "レシーバ·テスト"メニューに移動し、各値がゼロになるようトリムで調整します。
2: "PIエディタ"メニューに移動し、Pに150を設定して、Iはロールとピッチ軸の両方にゼロにする。ピッチ軸が自動的にロール軸と同じ値に変更されるので、ロール軸だけを編集します。P-limitとI-limitはそのままにしておきます。ほとんどの場合、それらを変更する必要はありません。
3:このビデオでは、航空機を停空飛翔、multicopterのPIゲインの応答挙動を比較しています。http://www.youtube.com/watch?v=YNzqTGEl2xQ
4:応答に応じて調整します。あなたが初心者で、まだ周りに飛ばない場合は、単に I ゲインをゼロするか、デフォルト値のままにします。また、ヨー軸のPI-ゲインはデフォルトのままです、しかし、あなたがstring tuning method.を使用する場合は、それらをゼロにすることを忘れないでください。
FW1.2
PI editor のデフォルト設定値
ロール/ピッチ軸(共通値)
P gain = 50 P limit =100 I gain = 25 I limit =20
ヨー軸(ラダー軸)
P gain = 50 P limit =20 I gain = 50 I limit =10
旧バージョン
PI editor のデフォルト設定値
ロール/ピッチ軸(共通値)
P gain = 150 P limit =100 I gain = 50 I limit =20
ヨー軸(ラダー軸)
P gain = 150 P limit =20 I gain = 50 I limit =10
2012-08-17 初稿
2012/09/05 改訂
2012/10/16 fw1.2変更点を反映(未完)
2012/11/07 fw1.3,1.4変更点を反映(未完)
2012/10/16 fw1.5変更点を反映
2012/12/28 FW1.5カメラジンバルスタビリティの設定について検証したので追記
2013/01/17 Y3コプターなどのヨー軸(ラダー)にサーボを使用する際のポイントを”mixer editor"の項目に追記
2013/03/15 コメントにてご指導頂いた点を見直し訂正 FC電源関連の重要ポイント
2013/04/01 ファームウェアのアップデートの際に管理人が使用しているUSB-APSアダプタ用ドライバとkkmulticopterflashtoolの提供元へのLinkを追記
2013/04/15 BECに関する説明追記
2013/06/05 低電圧アラームに関する事項追記
↧