本記事は管理人がMultiWii フライトコントローラーの利用を目的として、arduino、AVRマイコン、周辺機器に関連する事柄を理解するためにメモ的記録です。
最終更新日 2013/08/12
非同期シリアル通信
RS232Cなどに代表される送信側、受信側の同期を取らないデーター通信方式
少ない線数で通信が行える。
配線接続端子の表示は主に、TX、RX、G(グランド)と書かれている事が多い。
配線接続は
送信側 受信側
TX端子 → RX端子
となる事を忘れないようにする。
MultiWiiFCにGPSユニットをシリアルポート接続する場合
FC側TX端子→GPSユニットRX端子
FC側RX端子→GPSユニットTX端子
VDD 、GNDは同じ表示の端子で接続
電源電圧、信号電圧の異なる機器を使う場合は特に注意が必要
Arduinoで使われるUART(シリアル通信)でよく使われる
信号名(記号)、入出力、内容
RXD RD IN 受信データ
TXD SD OUT 送信データ
DTR ER OUT データ端末レディ
GND SG - グランド
DSR DR IN データセットレディ
RTS RS OUT 送信リクエスト
CTS CS IN 送信可
この他に電源供給用にVDD、5V、3.3Vという電源線
が隣接していることが多い。
特にこの電源ラインの電圧はarduinoのマイコン側で3.3V系 5V系があり、信号電圧もそれぞれ違うため、注意が必要。
UART Universal Asynchronous Receiver-Transmitter)
調歩同期方式によるシリアル信号をパラレル信号に変換したり、その逆方向の変換を行うための集積回路
UARTに同期式シリアル信号を変換する回路を追加したものが、USART。
I2C (Inter-Integrated Circuit)
正式な呼び方は「アイ・スクエアド・シー」、通称で「アイツーシー」
フィリップス社が提唱の高速通信可能な同期式シリアル通信方式。
信号線(SCL.、SDA)2本+電源線VDDで通信する。グランド(G)も含め4線で使用されることが多い。
マスター(EEMROM付きプロセッサーなど)、スレーブ(各種センサー)複数というパーティ構成が可能。
但し、スレーブ同士間の通信はできない。
オープンコレクタのため信号線とVDD間にPull-up抵抗が必ず接続される。
抵抗の値は使用する機器、電源電圧によって異なる。
I2Cを使用する場合、スレーブ機器の立ち上がりが遅れると通信不良になることが見られる。
特にウォームアップを必要とするスレーブ側機器の場合、通信ポートが
OLED Organic Light Emitting Diode
国内では主に「有機EL」と言われている、様々な特徴を持つ。
多くの特徴の中薄く軽い、磁気の影響を受けないなどの特徴はフライトコントローラーの
設定値コンフィグやテレメトリ表示に向いている。
Multiwii用として販売されているメジャーなOLEDディスプレイパネルは
I2Cで接続される事が多いように見受けられる。
※CRIUS OLED128×64を購入しテストしています。
OLEDの仕様なのか、I2Cの仕様なのか電源オン直後にランダムドット表示になってしまうと、まともに動作(表示)しません。
この状態でFCのリセットボタンを押しても正常には戻らず、電源を外さないとなりません。
電源オフ後すぐに電源を入れても同じようにランダムドット表示になることがしばしばあります。
このOLEDを販売しているショップの商品説明に大きく書かれている現象なので、異常ではないようです。
まだまだ続く
(。・_・)ノ
↧
MultiWii FC 入門レベルのメモ記事
↧
マルチコプター 【HKpilot mega2.5】屋内動作テスト
HKpilot mega2.5 +GPS(6M)+XBeeテレメトリという構成のQuadコプターが屋外フライトテスト直前まで漕ぎ着けたので、屋内で可能な動作テストの模様を録画しました。
一部始終を録画したのですが、長すぎるので(@^▽^@)ごく短時間に編集しました。
現時点で市販されているパーツ類の中では最も安価な構成でもここまでできるという一つの例としてご覧頂けると幸いです
・・・・
この記事は実は2回目で、先ほど公開寸前に雷で停電してしまい泣きそうになりました(^_^;)
説明等々また後日にでも追記するかもしれません
(。・_・)ノ
↧
↧
PR: それは、ただのビジネスか。クオリティ・ビジネスか。
 |
| 情報の質、量、スピード。今、あなたは、試されている。 |
↧
マルチコプター(Multicopter) 自作、製作の注意点
タイトルはたいそうご立派なので恐縮しますが、これからマルチコプターを自作するときに、ここはよく考えとくといいかなと思われる事柄を記録しておこうと思います。
この記事を最初にアップした時点から編集を重ねてずいぶんと長文記事になってしまいました。
でも、まだまだ更新しますよ(^_^)
最終更新日 2013/08/23 フライトコントローラー搭載時の注意点を記載
重要注意事項
マルチコプターは、特別な例を除き、複数のモーター、プロペラのうち、一つでも異常が発生すると即「墜落」となってしまいます。このときに正常なプロペラ、モーターの制御状態によっては、急激に思わぬ方向へ飛んでしまうこともあり得ます。
従って、プロペラの固定方法、モーターの固定方法や、ESC(Electric Speed Controller)との結線など充分な注意が必要です。
また、プログラマブルESCを使用する場合、デフォルト(工場出荷時の設定)で電源電圧を監視して、自動でバッテリーの過放電防止をするモノもありますが、マルチコプターでは、この親切設計が逆に危険な状態にしてしまう事もありますの。
予期せぬモーターのSlowdown、停止などの危険についての知識とそれらへの対策について処置が出来るまでは、この機能を出来る限り低電圧にする、もしくはオフにして、別途、過放電防止用のアラームを取り付ける等の対策を強くお進めします。Lipoバッテリーの保護は、とても大事な事ですが、ESCの監視電圧の設定ミスで墜落・・・は避けたいものです。
2013/01/05 追記
マルチコプターというVTOL機の模型について、インターネット上での日本語の情報も増えてきました。
いまや、携帯電話もスマホが主流となるほどインターネット社会になって、本当に手軽に様々な情報を容易に得ることが出来るようになっています。
このブログは管理人の愚痴も含みますのであえて記しますが、空中を時速60Km/h以上で移動することも可能な「飛行機」です。そしてどんなに注意しても事故は起こりえます。
危険予知、予防は全てに最優先される事は是非ご理解いただきたいと思います。
そこで本記事では、今後各項目ごとに「どのような危険が予想されるか」についても、管理人が判る範囲ですが、併記していきます。
またまた、前置きになってしまいますが、自作機の各パーツ、kitは全て「素材」です。
各部品、kitにメーカー推奨と表示されている組み合わせでも、構成部品の一部を修正したり追加工する必要があったりします。
これらの加工のためだけに道具工具を用意すると、意外と高額な出費になってしまいます。
管理人はこの点でかなり「失敗しちゃったかな・・・」とずいぶんとお小遣いを減らしています。
1,フレーム(機体)選択
市販の木製フレームから、FPR、CPRまで様々な素材のフレームが、ぱっと見、安価に販売されています。国内のwebショップでは日本語の取説付きというだけで数倍~10数倍の価格で販売しているものも見かけます。(最近少なくなりました)
メーカー名や生産国にこだわらなければ、木製Quad(4脚)フレームは送料別で8ドル(およそ640円)で買えます。これでも、Span(対向するモーター軸間)は539mmあります。モーター、ESCをケチらなければ、コンパクトデジカメ(200g)程度を搭載しても問題のないサイズです。注・・・あくまでも搭載できるという視点からです。
また、木製フレームキット(Span450mm)にモーター(ブラシレス)がセットになって30ドルで売られているのもあります。付属のモーターの品質云々は置いておいても、ブラシレスモーターが4つ付いて30ドルって・・・・。最初の機体で室内メインとしていなかったら、私はこれを最初に買っていたはずです(*^▽^*)
管理人の知る限り安価なフレームキットには、最大装備重量の記載のないものがあります。
飛行中のフレームにかかる荷重は意外と大きなものです。
構造、材質などなど要素は多岐にわたり、どうしたら・・・と、考えることが多いのですが、管理人は「正しく組み上げて、最小構成の軽量な状態でシェイクダウン(試験飛行)時にたわみや、異常な振動、音を注意深く観察し、少しでも異常と感じる場合には、潔く飛行を中止する」としています。
Quad、Hex、Oct、モーターの数が増えればそれだけお金が必要ですし、Octに至ってはコントロールボードも限られてきます。
ただし、この後にも書きますが、初めてマルチコプターを(できるだけ安価に)自作するという場合は、現時点(2012年12月)でフライトコントローラー(マルチローターコントローラーなどの表現もあります)は、個人的にKK2.0がおすすめです。これならOct(8Motor)まで使えます。
大きなお世話かもしれませんけど・・・・
ラジコン航空機作成、操縦のまったく経験の無い方で、独学で自作をはじめるのはかなり茨の道ではないかなーと思います。
とはいえ、オンラインショップなどで見かける完成機セットなら大丈夫かというとこれもかなり疑問ですが。
マルチコプターのモーターレイアウト、4モーターのQuad、6モーターのHex、Y6等々様々なタイプがありますが、どれが良いのかと言うことは別にして、同一平面上にモーターをレイアウトするフレーム形状の場合一般的に
運動性能が高い Quad(4)>Hex(6)>Oct(8) 安定性が高い
という関係性になります。
管理人は最近知ったのですが、スパン800以上のHex、Oct機ではより高度な安定性確保のためモーターを機体中心へ傾斜(スラスト)させている、もしくは傾斜できるようにしている機体(フレーム)が多いようです。何れも最初に手を付けるというサイズでも価格でも無いのですけど(^_^;)
マルチコプターのサイズについて。
※サイズや通称について明確な基準はありません。
マイクロサイズと記載しているのはプロペラ径5インチ以下対向モーター軸間が10インチ以下を目安にしています。
室内で旋回までさせて~となるとMicroMulticopterサイズ以下が適当でしょう。
しかし、市販キットはかなり限られます。また、フレームそのものを自作で小さくしてもコントロールボードや受信機、ESC、バッテリー等の重量をしっかり受け止め、耐衝撃性まで備えたものを最初から作るのは、キビシイと思います。
経験的にはTurnigy micro-quadが自作マルチコプターフレームキットの最小サイズでしょう。
・・・市販フレームキットなら壊れないと言うことではありません。墜落させれば高度1mの高さからでも壊れます。
室内で3Dさせたい時はRTF(レディ・トゥ・フライ【すぐ飛ばせます】)やBTF(バインド・トゥ・フライ【送信機とバインドすれば飛ばせます】)と表記されている手乗りサイズ完成機にしておいた方が良いと思います。(本記事のタイトルにそぐわないのですが・・・)

ウルトラマイクロ(ultraMicro)と言われるサイズのものです。↑の画像のようなものです。
このクラスの機体は60~100gと非常に軽量で少々ぶつけたり落としたりしても壊れない事が多いです。
このところのマルチコプター流行で。海外のネットショップで安価に販売されていますが、送信機が電波法の認証を受けていないモノがほとんどです、一言で言うと「違法電波送信機」です。
これらのセットを購入する場合は、国内の信頼できるショップから国内で使用できる送受信機付きの機体(セット)を購入されますよう・・・。もしくは国内認定された送信モジュール(電波を発信する回路部分で国内認証を受けている物があります))でバインド出来る機体を入手するなどもあります。(一部受信機側からも違法電波を送信する機体もありますので注意してください)
話が少々脱線し表現が適切ではないかもしれませんが、海外のラジコン事情と日本国内のラジコン事情だけに目を向けると、非常に残念ですが、もはや取り残された感は否めません。
だからといって指をくわえて見ているのは管理人にはとても癪に障ります。
そこで、法規制を遵守しつつ、より手軽に楽しむことができるよう工夫していきたいと考えて居ます。
2,プロペラ、モーター、ESC(Electric Speed Controller)選択
多くのショップでは機体(フレーム)とセット、もしくは推奨品として列記されることが多いと思いますし、それでもかまいません。
しかし、すこし調べてみると、その推奨品ではギリギリの出力(能力)だったり、実はESCのスペックをオーバーしてしまう事が容易に出来そうな組み合わせもあったりします。
モーターとESCは、実はマルチコプターの中で一番お金が掛かるところです(^0^;)
Quadでも4つOctなら8つも使いますから。Bicopterなら二つというつっこみは無しでお願いします。
ESC(モーターのスピードコントローラー)には、受信機やフライトコントローラーに使われる5Vまたは6VのDC電源供給機能(BECと表示されているもの)がついているものと付いていないタイプ(OPTO)があります。
この後に書いてありますが、フライトコントローラー(以下FCと記載)との兼ね合いもありますのでここではどちらが良いかではなく、一つの機体で使用するESCは同じ仕様、銘柄に統一して、BECの付いていないタイプを使用する場合には、受信機、FC用(必要であればサーボ用も)の電源を確保しなければなりません。
・プロペラの材質について
マルチコプターの人気で、逆回転(CW)プロペラも以前のプッシャータイプ機用しか見当たらなかった頃から、ずいぶんとラインナップが増えてきました。
グラファイト混合ABS樹脂、ローコストなABS樹脂のみ、ハイパフォーマンス用にカーボン樹脂などなど
管理人も様々なメーカーのプロペラを使ってみましたが、これもやはり適材適所という感じです。
初級、中級機で軽量な機体であれば,安価な柔らかいABS樹脂製で十分だと考えて居ます。
プロペラ強度が上がれば高回転、高出力時に「たわみ」が出にくく、効率も高くなります。
しかし、強度が上がれば、衝撃に弱くなり、有ってはならない事ですが、プロペラとの接触事故のリスクも上がります。
逆に、空撮用にカメラを搭載し、バッテリーも大容量なものを搭載するような機体では、柔らかいプロペラではプロペラのたわみ振動がコントローラーなどに影響することも考えられます。
このクラスになると、この記事そのものが適用しなくなりそうですね
機体(フレーム)の目星がついて、フレームの重量が概略でもわかったら、予定している受信機などの電装品とモーター+ESC各必要分などの重量を合計して飛行状態全備機体重量を想定してモーターを選定すると、後々の出費が抑えられるはずです。
ほとんどのモーターの説明に、thrust とかpullという表現で推進力が表示されています(そのときのプロペラのサイズも併記されていることが多い)ので、モーターの推進力の5~6割×使用個数≒想定重量を目安にすると良いと思います。
(;゚〇゚)ハッ、 モーターの回転数を示すKVですが、Multiコプターには通常スローフライト用プロペラを使うことが多いので、Microサイズでなければ800KV~2000KVが主流のようです。
推進力については、プロペラのサイズ、ピッチ、回転数である程度の机上計算ができます。
推力計算式はラジコン技術誌2006年6月の記事から引用。ただし、計算式最後の項目の数値(推力では22、電力では0.45)は、APCスポーツプロペラの係数になっているそうで、スローフライト用のプロペラは多少低回転域の推力や効率が増しているはずですが、まぁ、この時点では安全係数として見ておきましょう。
静止推力(g)=(プロペラ径÷10)^3×(ピッチ÷10)×(回転数÷1000)^2×22
消費電力(W)=(プロペラ径÷10)^4×(ピッチ÷10)×(回転数÷1000)^3×0.45
※単位:プロペラ径、ピッチはinch、回転数はr.p.m.、推力g(グラム)、電力W(ワット)
ついでにプロペラによって得られるピッチスピード(プロペラの直ぐしたのところの風速)の計算式は
ピッチスピード=(P/10)×(N/1000)× 15.24 単位(Km/h)
具体例で計算してみます。
管理人の所有機Talon Xコプター(全備重量≒800g)に使用しているパーツで計算してみます。

この画像の左上がTalon クアッドコプター Xモードです。
モーター=2822 1100KV
バッテリー=3S Lipo(定格11.1V) カットオフ直前の10Vで計算します(簡単だし(^0^;)
モーターのKV値×電圧=回転数
静止推力=(8÷10)^3×(4.5÷10)×(1100×10÷1000)^2×22
=0.512×0.45×121×22
=613(g)
8045プロペラを11000回転させるときの消費電力を計算します。
消費電力=(8÷10)^4×(4.5÷10)×(1100×10÷1000)^3×0.45
=0.4069×0.45×1331×0.45
=110(W)
モーターやESCの効率を考慮して1.25倍します(負荷効率80%として)
必要電力=110×1.25=137W
電流値=137÷10(V)=13.7A
※注 8インチのプロペラを11000rpmで回すと、プロペラ外周部の速度は
およそ420km/hにもなります。仮に半分の5500rpmでも210km/hです。
このような高速で回転するプロペラの薄い外周先端部に触れるような事があればどうなるかは想像に難くないと思います。
ESCに定格12Aのモノを使ってる私としては、ちょっと困った数字になっています(*^▽^*)
まさにショップリコメンドの罠にはまっています(ノД`)
とはいえ、これでダメかというとそうでもありません。
モーター一つに掛かる必要推進力に余裕があるからです。
Talonの重量800gを均等にわればモーター一つあたり200gの推進力で静止、上昇するには静止加重の125%以上といわれているので目安として250gとしても十分な余裕があります。
ただし、フルスロットルを続ければ確実にESCが焼けそうですが・・・。
追記・モーターの最大出力が125Wと書かれていたので、モーターもギリギリ壊れそうです(^_^;)\(・_・) オイオイ
追記
プロペラの材質、品質に大きく影響されますが、安価な樹脂プロペラは常用回転域を6000r.p.m以下にしておいた方が良いと思います。
また、上の計算では11000rpmなどど普通に書きましたが、あくまでも机上計算であるという事を承知してください。
ラジコン技術の記事にもありますが、推力と電力の関係でいえば、低回転で大きいプロペラの方が効率が良いです。
しかし、今度はフライトコントローラーとの兼ね合いが出てきます。フライトコントローラーによる姿勢制御は応答性の良いプロペラ(要するに小径プロペラ)の方が安定すると明記されていますし、経験的にも機械的にもそうだろうなと感じます。
こういったあちらを立てれば、こちらが立たずの関連性はどこの世界にもありますし、モーターやプロペラ、バッテリーの入手性、価格も含めた兼ね合いを自分で考えられるのも自作の楽しみです。
3,フライトコントローラーの選択と、機体への搭載時の注意点
つい、先月(2012年7月)までは、安価なフライトコントローラーといえば、パソコンからファームウェアを転送しないと使えなかったり、機種タイプ別に固定の制御プログラムしか無いため、機体を変えたときは必ずファームウェアを書き換えなければならないと言うものばかりでした。
例.kkmulticopterのV5.5(通称blackboard)・HK multirotorconntolboardV2.1,V3.0等
(まぁ、。それはそれで楽しみだったりしますが(*^▽^*)
フライトコントローラーも電気で動きます(*゚∀゚*)
その電源は通常DC5Vです。供給方法は飛行用バッテリーからBECで供給する方法が一般的です。
BEC付ESCを使う場合には、各FCに適応する個数以外のBEC電源線は接続しないよう処置しましょう。
管理人としては、現時点では択一になってしまいますが、ホビキンのLCD付きFC kk2.0 がお勧めです。とりあえずパソコンを必要とせず、一般的に知られている機種(Quad4,Y6~octcopterなどなど)にも対応できます。
2013/08/23追記
機体への搭載時の注意点
フライトコントローラーの種類も増えて、高機能化も進んでいます。
初期の頃のような3軸ジャイロセンサーのみであれば、機体にリジットで取り付けても、さほど問題になることは無かったのですが、加速度センサーを搭載したものが一般的になって、機体の振動が機体の姿勢制御に影響することが顕著になっています。
また、IMUと呼ばれるセンサー群を搭載するようになって、磁気の影響も受けるようになります。
こういったセンサーへの配慮をしなければ安全なフライトは望めません。
これら振動、磁気への対策は機体全体で考慮すべき点なので、一言でこうすれば良い、ということは管理人にはできません。
フライトコントローラーには、振動を伝えず機体の傾き(挙動)だけを与え、電気で機能するものに電線を近づけない・・・・そんな事できるわけ有りません
これらのことをまず「知って」搭載する事が大切だと考えて居ます。
・精密な制御を行う電子機器ですから、大電流の流れるモーター用電源線からできるだけ離した方がいいでしょう。
レイアウト上近接してしまう場合には、アルミ箔のような非磁性金属で磁気の影響を受けない様にする工夫も必要になるかもしれません。
お勧めはしませんが、気になるときは100均などで売っているコンパス(方位磁石)をフライトコントローラーの上にでも置いて、モーターを回して方位磁石の針の動きをみてみるという簡易的なチェック方法があります。(安全には十分配慮してください)
・一般的に言われる「振動計」とは加速度センサーで振動を検出、計測しています。
機体の姿勢制御用加速度センサーが「機体の振動計」にならないようにします。
・GPSセンサーは衛星からの電波を受信しています。この電波は障害物があると簡単に遮られます。機体が傾いた時、機体の各部、パーツなどでGPS信号が遮られることのないように搭載します。(特にCFRP素材や金属を多用している機体の場合)
・その他・・・・
→ KK2.0 取扱説明記事はこちら ←
従来の3軸ジャイロ制御のFC(HK MRC V3.0など)でも十分にホバリング~ノーマルフライト~3Dまで出来ます。
あ、ごめんなさい、できるはずです(^_^;)
万年初級者の管理人には、KK2.0やMultiWiiFC等に搭載されている6軸(正しくは3軸ジャイロセンサー、3軸加速度センサー)制御は
multiwii系のFCには、GPS付きやGPSユニットをオプション接続出来るものもあり、マルチコプターの自動航行(定点ホバリングやゴーホームが有名ですね)は、とても魅力的です。
スイッチ1つでホームポジションに戻ってくる・・・。機首の向きが??になったときに慌てずHeadFreeモードにすればエレベーターは前後、エルロンは左右の操作になってくれる・・・等々
(もちろんFCが対応していればです)
AVRプログラミングの基礎知識が必要になるのと、当然のようにパソコンとの通信も必要です。
ややハードルは高いのですが、KK2.0などのFCの次のステップとして挑戦する価値は有ると思います。
最初からMultiWiiでも良いのですけど(^0^;)
→ MultiWii V2.2 の取扱説明(未完)はこちらの記事を参照ください
金銭的に余裕のある方はDJIのGPS付きFCという選択肢もあります。
※DJI NAZAシリーズも設定にはパソコン(Windows)が必要です。
DJI NAZAーMは、上記のFCよりは操縦者の操縦技術に頼らない高度な制御も可能です。
DJI NAZAシリーズの特徴的な操縦操作があります。
通常使用される、ATTI.と(GPSホールド)モードでは、スロットル操作はセンターを中心に高度を上げろ、下げろという指令になるということです。
・・・あまりピンと来ないかもしれませんが・・・(^_^;)
FCとしての設定も簡単かというと・・・管理人には十分難しい部類だと思いました。
それでもMultiWiiFCやKK2.0よりは情報源がしっかりしているので安心感はありますし、NAZA-MV2の取扱説明書はかなり改善されています。(初めて自作するという方に親切といえるレベルとは言えないなーと管理人は思います。
)APM DIYdrone
UAV(無人航空機)の開発をメインとした自動航行制御装置という意味合いの強いフライトコントローラーです。
使用するハードウェアはarduinoMEGA2560
・・・・管理人勉強中です
4.電源系
一般的にLi-Poバッテリーの2~4S(7.4~14.8V)が良く使われていますし、入手性も悪くはありません。
ただし、Li-Poバッテリーは「本当に気を遣って取扱、管理」しないと十分な性能を発揮できませんし、取扱を誤れば簡単に使えなくなってしまうものです。
Li-Poバッテリーの取扱について細かく説明する事は管理人には無理なので、ここでは一般的な取扱い上の注意点とバッテリーを選ぶときに参考にしている点について・・・
Li-Poバッテリーの表示されている記号、数値の内容
管理人も良く3s2200mAh 25Cなどと記載するのですが
これは3セル直列(Series)の11.1V定格電圧、電池容量2200mAh、25Cとは電池容量(2200mA)の25倍=(55000mA=55A)の電流で使用出来ますという意味です。
*上記バッテリーの電池容量は、【定格電圧で2200mAの電流を1時間(h)流すことができる】を意味します。
-参考- 二次電池の規格的な表現では0.1Cで充電し、0.2Cで放電させたときの容量をさすようです。
Li-Poバッテリーは1セル(たとえば乾電池1本に相当)あたりの定格電圧は3.7Vです。
マイクロサイズのマルチコプターやヘリ、飛行機などには1S3.7Vのバッテリーを使う物が多いですね。
この1セル単位(3.7V)の電池を直列にパッケージしたものが2s以上のバッテリーというわけです。
Li-Poバッテリーの取扱い上必須となるのが電圧のチェックです。
汎用テスターでも良いですし、Li-Poバッテリー用の電圧チェッカーなどでも良いのですが、
電圧を0.01V単位で読み取れるものが良いでしょう。
Li-Poバッテリーの使えなくなるまたは、破損すると言われている条件
放電しすぎ(過放電)でバッテリー電圧がセル当たり2.6Vになると電池としての機能を失う。
充電しすぎ(過充電)でバッテリー電圧がセル当たり4.2V以上になると発熱、膨張、破損(パンク)、最悪爆発炎上
放電容量が定格を越えている場合、発熱、膨張、破損(パンク)、最悪爆発炎上

リード線短絡(ショート)した場合、短時間のうちに破損、爆発、炎上の可能性が非常に高い。
パチッっと一瞬の短絡で、直ちに外観上の異常は見られなくとも15分以内に膨張、破損、炎上の危険性が残っている。
放電電流の管理については、いろいろと大変な事が多いので目安としている事
満充電のバッテリーでフライトを開始して「パワーが落ちてきたな」「飛行開始時点よりスロットルを上げないと上昇しなくなった」と感じるなどして着地させてすぐバッテリーの電圧を測ります。このときのバッテリーの電圧が、セル当たり3.3V程度であれば、フライト開始からの飛行時間でバッテリーの許容定格電流を越えているか否かの目安になります。
1時間(60分)÷飛行時間(分)×バッテリー容量(A)=フライト時の平均消費電流
-例-
3s2000mAh25cのリポバッテリーでフライト開始から4分後にバッテリー電圧が9.9Vになった場合
60(min)÷4(min)×2(A)=30(A)・・・平均消費電流
バッテリーの定格電流は25Cなので定格放電電流は50Aとなるため、最大定格電流以下でOKと判断します。
アクロバット飛行などのようにスロットル変化の大きな飛行の場合には当てはまらないこともありますが大まかな目安になります。
もう一つ、満充電のバッテリーを、5分間で使い切るのは12C
3分間では20C、2分間では30Cの平均消費電流になっているという事になります。
・・・実機の某旅客機のように何年も最先端技術の専門家が設計開発されているにも関わらずバッテリー(Li-※※)異常で発生した煙が機内に漏れ出して、改善まで飛行運用禁止になった事故があるほどです。その事故の対策改善も万一異常が発生しても煙が機内に入らず、機体の外に放出されると言う・・・ようするに判らんこともまだまだ残ってるということでしょう
。ラジコン用途では無いようですが、リポバッテリー専用以外の充電器(Nicad用など)を誤用してしまい火災になっているという事例がここ数ヶ月に5件も起きているそうです。2013年5月時点
さて、怖いことばかり書きましたが、上記の条件にしなければ、現在これほど高性能なバッテリーはありません

細かい管理方法は専門の方にお任せするとして、管理人は最低限以下の項目を守って使用しています。
「できるだけ高性能なLi-Poバッテリー専用(あるいは専用機能付き)充電器を使う」
「充電モードはfastチャージモードで充電電流1Cとしてフルチャージにしない」
「保管は推奨されている電圧(1セル当たり3.8V±0.05)で、安全な場所に」
「推奨電圧範囲 1セル当たり4.2V以下、3.2V以上で使用」
「外観上の破損が無いことや電圧はこまめに点検」
「定格放電電流を越えない」
Li-Poバッテリーの取扱上の注意点に十分注意して、各ESCへの分電、必要ならFCやその他のアクセサリーへの配線を行います。
~若干余談~
ガラス繊維強化プラスチック(GFRP)は絶縁性ですが、カーボン繊維強化プラスチック(carbon-fiber-reinforced plastic : CFRP)は導電性があります。管理人も時々忘れそうになります(^0^;)絶縁には注意しましょう。
管理人が店長のオンラインショップ ホビーショップ雅夢 の宣伝を少し
海外から安価なパーツ取り寄せて、いろいろなブログを見て回って作ってはみたけど、うまく飛ばないとか、どこが壊れているかワカラナイ・・・、なんとかならないかなーと言う状態になってしまったら、お気軽にご相談ください。ショップのお問い合わせページからお願いします。
他店で購入したキット、パーツでも一機当たり機体の大きさ、複雑さによりますが,
組立調整作業代行費と完成機とするために必要な部品の費用でホバリング調整まで承っています。
2012/12/16 保守改訂
2013/01/05 保守改訂
2013/01/27 保守改訂
2013/03/07 KK2.0取扱記事へのLink修正
2013/04/02 見直し、加筆
2013/05/24 長くなったのでpart2にしたものが埋もれてしまったのでこちらに一本化
2013/06/18 Li-Poバッテリーの取扱について追記改訂
2013/07/12 プロペラの危険性とLipoバッテリーの項目を手直し改訂
2013/07/14 フレーム、モーターレイアウトに関する事柄追記
2013/07/30 ESCのBEC等について追記、他数カ所追記
2013/08/23 フライトコントローラー搭載時の注意点を記載
(。・_・)ノ2013/08/23 フライトコントローラー搭載時の注意点を記載
↧
マルチコプター DJI Phantom 国内正規セット
やっと出ました、待望のファントム送信機付きセット!
早速入荷♪
ただ飛ばして楽しむだけでは勿体無い。
Gopro専用ブラシレスジンバルも取り付けます。
![]()
付属の送信機にはジンバルチルトコントロールレバーが付いていないですし、機体側受信機能にはジンバルチルトコントロール用出力がありませんので
これらのオプションも取り付けますよ。
明日から楽しいオプション取り付けです。
Android携帯からの投稿
早速入荷♪
ただ飛ばして楽しむだけでは勿体無い。
Gopro専用ブラシレスジンバルも取り付けます。

付属の送信機にはジンバルチルトコントロールレバーが付いていないですし、機体側受信機能にはジンバルチルトコントロール用出力がありませんので
これらのオプションも取り付けますよ。
明日から楽しいオプション取り付けです。
Android携帯からの投稿
↧
↧
PR: 想像から始める防災・減災-政府ネットTV
 |
| 災害に対する事前の備えやその対処法等、来るべき大災害に生き残るための方法をご紹介 |
↧
マルチコプター 【DJI Phantom】Beholder取り付け
RTFセットのPhantomですが、カメラジンバルを取り付けるとなるとそれなりに覚悟?が要ります。
Gopro用ジンバルにはDJI純正の高価なものには手を出しません。(^_^;)
水平維持だけでしたら自律Controller付のジンバルキットに電源だけ供給すればOKなのですが、ここはやはりチルトコントロールも可能にしたいところです。
ということでとりあえず二軸ブラシレスジンバルの組立、取り付けまで

ジンバル側の組立はそれほど苦も無くできあがり。。機体側にジンバルホルダー(取り付け用金具)、ジンバル用Controllerを取り付けます。


※上の画像は作業途中の様子見で、これでも当たっています。最終的には上の画像の視点でピンが全て見える状態まで削り込んでいます。

単独での自律制御は良好です。
明日はPhantomの機体内部の改造。
ジンバルのチルトコントロールも送信機からできるようにアップグレードキットを組み込みます。
(。・_・)ノ
↧
マルチコプター 【DJI Phantom】 ジンバル制御出力対応アップグレード
DJI Phantom レシーバー側アップグレード
手順はDJIのyoutube動画を確認しながら行います。
now going(@^▽^@)
手順はDJIのyoutube動画を確認しながら行います。
now going(@^▽^@)
↧
元カメラ小僧(死語(@^▽^@))の今昔
--注--
この記事はなんか唐突に過去を振り返った管理人の回想録です。
突っ込みどころ満載です。なつかしいねぇと微笑んで読んで頂けると嬉しいかな
ちなみに、カメラ小僧という言葉の意味で「アイドルのパンチラを狙って追いかけまわすヤカラ」のことを指す場合があるようですが、この記事のそれとは違います!!
小学生低学年の頃、ハーフサイズフィルムを使った一眼レフもどきのおもちゃのカメラ(その頃はToyカメラとか言わない)を持って近くの東武東上線特急の写真を良く撮影していました。
暫くするとスーパーカーブーム(カタカナで書くとなんかおかしいw)で、外車を見ればスーパーカー!と追いかけて眺めたものです。(当時のドライバーさんはジャマくさかったに違い有りません)
子どもの頃にフィルム代、現像、焼き付けなど、それはもうお小遣いの範囲ではなく、両親に頼み込んで写真屋さんに出したものでした。
だからこそ?一枚一枚が一期一会のシャッターチャンスで手ぶれなどで数枚オジャンになると泣きたいくらいに悔しかったのを思い出します。
中学生になると親の一眼レフを触らせて貰えるようになりました。
裕福な家庭ではありませんでしたが、一眼レフカメラはありました。
ペトリペンタの一眼だったのは覚えているんですけど型番は忘れました。
もちろん代えのレンズなどなく、50mm単焦点レンズ1本です(^_^)
それでも、露出(露光)がどーの、ピンが甘いだのと一通りのうんちくを並べては「写真」を眺めて居ました。
高専にはいると、言うことはプロカメラマン並です(爆笑)まぁ、そういう年頃でした
リバーサルフィルムでスライドを作って学校のスライド投影機を使わせてもらって・・・この辺りから「センス」というものを持ち合わせて居ないことに気がつき始めます(^_^;)\(・_・) オイオイ
なにかイベントがあればカメラをぶら下げ出かけました。
そうして月日は流れ
この頃ですね、「センス」って感性という意味がやっと判ってきた気がするんです。
もちろん若い頃から感性を磨いている人には及ばなくとも、感性を磨くことは幾つになっても誰にでもできる・・・ようなきがしています。
それは写真だけで無く、自分が感じる全てにおいて「感性を磨くチャンス」と思って良い気がします。
・・・なんつって、今日もアングラKingと自称するAK-69のラップを聴いてたり・・・
クラシック音楽で感性を~なんて無理!!
歯医者に通院の際、家内の運転する車の後部座席から稲刈りしている風景を眺めつつ、
「あぁもう秋なんだな~」「げいじゅつのあきだな~」などとつぶやきながらスマホのシャッターを切るのでありました。
そういえば、スマホのシャッターを切ったときメモリにWriteしているのは分かりますが、画面がエフェクトするのは、懐かしさを捨てない配慮?なのかなぁ
いまでは空撮もしてみたい!などと言っている元カメラ小僧でありました。
↧
↧
PR: 振り込め詐欺 知っておきたい心がけ-政府ネットTV
 |
| 最新の手口や、ご家族に伝えて欲しい普段の心がけ等について、警察担当者が詳しく解説 |
↧
ラジコンヘリ マルチコプター全般の慣らし運転について思うこと
最近はマルチコプターばかり製作、改造、フライトしている管理人ですが、先日phantomのバージョンアップ基板を取り付けた後、動作確認のためモーターを回してみたときのことです。
管理人は、いままでモーターに限らず回転機全般、可動機械要素すべてにおいて「馴染み」というものがあり、試運転は必要なものだと思っています。
特にプロペラ直結のスラスト荷重のかかるモーターではプロペラを付ける前、付けた後に少なくとも5分、できれば20分ほどの軽負荷慣らしを行っています。
このときシリコンオイルをベアリング部に適量給油するのは基本だと思っています。
しかし、このPhantom、プロペラを付けない状態で3分も回すとモノコック構造のアーム外側から判るほどアンプ(ESC)部分が暖かくなり、「なにぃぃぃ密着しているわけでも無いプラスチック表面が暖かくなるほど発熱するのか」と慣らし運転をやめました。
プロペラの風が直接当たらないから、あ、いやプロペラ付けてないんだけど。。。
無負荷電流0.2A以下のはずなんだけど・・・・
翌日、制御値(P)の調整のためフライトテストをする予定だったので、そのフライトの前5分アイドリングレベルで気休め程度の慣らし運転をしました。
この慣らし運転の時に、ハズレのモーターがあると、他のモーターより発熱していたり、ベアリングの音がおかしかったりといった事もわかります。
モーターなどの慣らし運転、みなさんはどうしてますか?(^0^;)
(。・_・)ノ
↧
PR: 想像から始める防災・減災-政府ネットTV
|
| 災害に対する事前の備えやその対処法等、来るべき大災害に生き残るための方法をご紹介 |
↧
KK2.0を注文したらKK2.1が納品されてきた。
KK2.0 よくできてると思うんですよね。
おそらく内部メモリーぎりぎりいっぱいまで工夫して練り込まれたファームウェア。
いま、手元にKK2.1のファームウェア1.91sがあります。(自分でアップデートしました)
写真や、具体的な調整についは、また別途記事にしようと思っています・・・・が!
「ナニコレ!急激に調整範囲増えてるし!まだいろいろドラフト状態の部分満載ぢゃないか!!」
きびしいなぁ、動作確認や挙動確認、そして日本語化しないと・・・・・
新年早々・・・やらないとだめだろアイテムがまた一つ増えました。
とりあえず実証テスト用にテスト用F330フレームに取り付けてみました
FW安定バージョンが提供されるまでは、メーカーデフォルト(KK2.0と互換のFW1.5)を
使用しておくほうがいいのではないでしょうか。
(。・_・)ノ
↧
↧
PR: 【試乗会開催】ボルボ 60シリーズ R-DESIGN
 |
| 今なら、ご試乗・査定をされた方に素敵なプレゼントを進呈! |
↧
【マルチコプターFC】HK KK2.0(2.1への対応作業中) 取説 自己流翻訳
最新更新日 2014/01/10 KK2.1対応ファームウェアアップデートツールDL先修正
本記事は「非公認取扱説明記事」ですので、ここに記載の通りにならなくても責任は負いません。
管理人が店長をしていますオンラインショップ 「ホビーショップ雅夢」 にてKK2.1を取り扱っています。
KK2.1はメインプロセッサのメモリー容量が従来の32KBから64KBのものに変更されACCセンサー類も変更されています。
基本的な動作、操作方法はKK2.0のファームウェアバージョンと同期されているようです。
2014/1/2時点では入手時のファームウェアバージョンは1.5でKK2.0FW1.5と設定、操作方法に違いは見られません。
また、販売元からFW1.6が使用可能になっているというアナウンスがありますが、このバージョンはKK2.0のFW1.6とは仕様が異なると明記されています。
HobbyKing KK2.0マルチロータ·コントローラー·ボード(以下、文中ではFCと記載)
User Manual ユーザー·マニュアル
レイアウト:
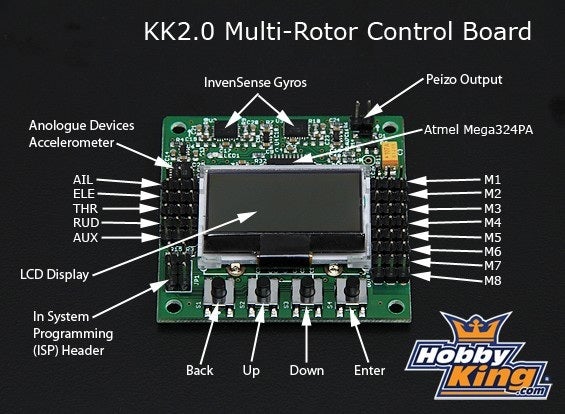
初期設定:
液晶画面上をフロント、ボタン側をリアになるようフレームにFCをマウントします。
(上の画像では上がフロント、下がリアになるように搭載します)
左側の端子にレシーバーを接続します。 FCの端(基板端面)側にマイナス(黒色または茶色)リードがくるようにします。
順序は、前から後に、次のとおりです。エルロン(A)、エレベーター(E)、スロットル(T)、ラダー(R)、AUX。
FW1.2にてCPPM機能が搭載されたので、入力の順序を入れ替えることが可能になっています。ただし、未検証です

FW1.6aにてサテライトレシーバー(KK2.0サポートtarotケーブル必要との事)にも対応する事が可能になっています。未検証です。
送信機のスイッチチャンネルをAUXに接続します。(一般的にはGearスイッチ5chでしょうか・・・)
右側のピンにモーター(ESC)またはサーボを接続します。
前(フロント側)からM1、M2・・・・、M8となります。 FCの端側(画像では右端)にマイナス(黒色または茶色)リードが来るように接続します。
FW1.5からカメラジンバルのスタビリティ出力2ch(P/R軸)が出来るようになりました。
この場合、ESC出力は6点までとなり、出力チャンネルの7chがロール軸、8chがピッチ軸コントロール用サーボ出力になります。
カメラジンバルスタビリティを使用する場合は、MENUモード画面からCamera Stab Settingsの項目のPitch、Rollの各Gainを0以外にします。これにより出力チャンネル7,8にスタビリティ信号(サーボ用)が出力されます。
制御値のsettingはゲイン値500からを推奨
サーボの動作方向を変えたいときは、ゲイン値をマイナス(-)にします。(例.-500)
モーターのレイアウトについては下記を参照してください。
まだプロペラを取り付けないでください!
出力側M1~M8チャンネルの電源について
M1コネクタは常にESC(5V BEC)が接続されている必要があります。このESCはFCに供給する唯一の5V電源になります。M2~M8の電源から独立しています。これによって、FCは安定した電源を確保します。
(このFCの電源電圧は4.7V~6Vと商品説明に記載されています。)
※低電圧アラームのマイナス(Return)はM1コネクタのマイナスに接続されています。FCの低電圧アラーム機能を使用する場合は上記画像右上PIEZO OUTPUTのすぐ近くにある基板のスルーホールに監視する電源の+極側から配線接続(ハンダ付け必須)します。スルーホールへはピンをハンダ付けしてピンコネクタで配線をお勧めします。上記より追加配線はプラス側1本だけで機能します。
M2~M8の5V電源ピンは互いに接続されており、ここに接続されるすべてのサーボなどの給電を必要とする機器は、M2~M8に接続されているESC(BEC)によって供給されます。
※重要※
M2~M8への給電に電圧の異なるものや複数のスイッチングBECを同時に接続しないでください。
ご使用になるESCのBEC仕様を確認してください。
一般的に市販されている2~3SLi-Poバッテリー用ESCに搭載されているBECは、LinearBECが多くLinear(リニア)BECの場合、単に「BEC」と表示されているケースが多いです。
スイッチングBECは、主にSBEC、U-BEC、UBECという表記がされているようです。
(必ずしもこういう表記になっているとも言えません、正確にはESCの取扱説明、仕様を確認してください)
多くのサーボを使用するとき、例えば、カメラジンバル制御やBiCopter等では、十分な容量のBECを接続する必要があります。
KK2.0を飛行機の姿勢制御に使用する場合はファームウェアV1.4公開時に飛行機用ファームウェアが提供されていますので、そちらの使用をお勧めします。
本記事はマルチコプター用として公開、提供されているファームウェアについてのみ更新改訂の予定です。
ファームウェアのアップデートの際にUSB-ASPアダプタを使用する場合、こちらのこちらのサイト【fischl.de】で提供されているドライバをインストールする必要があるかもしれません。上記サイトで提供されているファイル形式はやや特殊な圧縮ファイルですので、わかりにくい場合は検索サイトで「USBASP ドライバ」などで検索するとよいかもしれません。
また、ファームウェアの書き換えについては、管理人の調べた中で、フリーウェアでかつ、管理人のようにプログラム(ファームウエア)のソースコードなど読めないユーザーが使用できるのは【KK Flash Tool】しか見当たりません。
(このツールは、こちらの→KKmulticopterFlashtoolサイト←のページ
2014/01/10確認済みKK2.1にも対応する安定バージョンが公開されています。
※ファームウェアのアップデートは、それほど難しいものでは有りませんが、いずれも自己責任において使用されるソフトウェアです。ご注意ください。
送信機に、通常の飛行機のプロファイルを使用し、新しいモデルをセットアップします。
各チャンネルのミキシングは基本的に不要なため、誤動作を避けるために飛行機用という指定をしていると思います。と思っていましたが、マルチコプターの特性、ブラシレスモーターの特性として、アイドルアップや、スロットルカーブカスタマイズを考慮すると飛行機用にこだわる必要は無いと思います。ヘリ用プロファイルを使用される際は、Mixing機能は使用しないでください。
電源を入れて、メニューボタンを押し "レシーバ·テスト"サブメニューを入力してください。
送信機の各チャンネルを動かし、スティックの動きと各項目の表示方向が合っていことを確認してください。
同期していない場合は、送信機のチャンネルを反転させます。
送信機のスイッチ(AUXチャンネル)をチェックして、 "ON"になるよう、送信機のAUXチャネルを反転させます。
トリムまたはサブトリムを使用して、LCDに表示チャンネルの値をゼロに調整します。(AUXを除く)
"Load Motor Layout"
サブメニューを入力し、必要な構成を選択します。必要なコンフィギュレーションが表示されない場合は、 "mixer editor"(ミキサーエディタ)サブメニューを使用して設定します。これについては後述。
"Show Motor Layout"
サブメニューを入力し、次の点を確認します。設定は正しいですか?モータやサーボは正しい出力が接続されていますか?正しい回転方向ですか?
それがマウントされているアームを下げたときにモーターがスピードアップしていますか?
"PI Editor"
サブメニューを入力し、正しいPIゲインの値を確認してください。既知の良好な値またはデフォルトのものを使用します。(デフォルト値は最後部に記載があります)
"Esc Calibration" FW1.2以降にて下記4,5項目の手順が「やりやすく」なりました。
※注意、使用するESCによっては、キャリブレーション機能の無いものがあります。
使用するESCの仕様を確認の上、必要な場合のみ行ってください。
スロットルキャリブレーション機能の無いESCでこの項目の操作を行うと、モーターが急激に回転したりと危険な場合があります。
手順:
1:重要:プロペラを取り外して、危険の無いようにしましょう!
2:FCの電源をオフにします。
3:送信機の電源をオンにし、最大にスロットルを設定します。
4:ボタン1と4を押し、最後のステップまで押し続けます。途中でボタンを離すと、キャリブレーションを中止します。
FW1.2から、機体FCのバッテリーを繋いでから素早くこのボタンを押せばキャリブレーション状態になるように変更されました。5:FCの電源をオンにします
6:ESCのビープ音を待ちます、フルスロットル信号が校正されています。 数秒かかりESCに依存しています。
※このビープ音は通常モーター出力にビープ音周波数の出力をして“モーターの微振動音”を用いています
7:アイドルにスロットルを下げます。
8:ESCからの[アイドルスロットル]キャリブレーションビープ音を待ちます。
9:ボタンを放します。
-今、あなたはプロペラをマウントし、テストすることができます。
あなたは地面にmulticopterをおいて、5メートルの距離をおくまで、アーミングにしないでください。
スロットルをゼロ、ラダーを右いっぱいに数秒保持することによってそれをアーミング状態にできます。
ビープ音が鳴り、LEDが点灯します。
スロットルをゼロ、ラダーを左いっぱいに数秒保持することにより着陸後はアーミング解除(SAFE)にします。
ビープ音がしてLEDがオフになります。
あなたがmulticopterに達する前にアーミング解除してください。
アーミング後スロットル上げてすぐに転倒した場合は、各部の接続とカスタムメイドのミキサーテーブルを確認してください。
揺れたり、離陸後に揺れる(シェイク)する場合は、ロールとピッチのPgainの値を下げて調整します
離陸、ホバリングが容易になるよう、調節してください。(日本語に表現するのが難しいので原文を転記)
If it shakes and maybe climbs after its airborne, adjust the Roll and Pitch Pgain down.
if it easily tips over after its airborne, adjust up.
前後左右にドリフトする場合は、ドリフトを抑えるためにトリムを使用します。
通常、風によってドリフトします。
過度のトリムが必要な場合は、アームとモーターが正しい角度を持っているかどうか、モーターが良好であることを確認してください。
上下にピッチングせずにまっすぐに飛ぶ範囲で、ロールとピッチの I ゲイン(Pゲインとの違いに注意)を増やしてください。
それをアーミングまたは武装解除しながら右にエルロンを保持することによって
セルフレベリングをオンにします。
左エルロンを保持することによって、それをオフにします。あるいは、
AUXチャンネルにこれを割り当てることができます。下記を参照してください。
管理人追記 スティック操作でのSelflevelingのスイッチは出来なかった。
selflevelingを操作するには、FCの設定で常時ONもしくはAUXスイッチが必要
-*-*-*-*-*-*-*-*-*-*-*-
設定メニューの説明。
"PI Editor"
ここでPIゲインの設定を調整します。変更したいパラメータを強調表示し、[Prev]および[Next]ボタンを使用して、[change]ボタンを押してください。
ロールとピッチの両方を同時に調整するには、 "モード設定" サブメニューを参照してください。
"Receiver test"
:レシーバからの出力を確認してください。
このレシーバーテストいろいろ応用が出来て良いです。
送信機、受信機をカスタム(市販のセット売りでは無い組み合わせ)に組み合わせるとき、送信機のゼロポイント(エルロン、エレベーター、ラダーなどでは中立位置、スロットルは最スロー)が受信機から適正に出力されているかをデジタルで確認することが出来ます。
管理人のように安物プロポ(失礼)安物受信機(これまた失礼)では、PPM信号の特性が変わることがあるため、組み合わせの良否判定や、不具合の有った場合の修正目安としても使えます。(もっとも、本当はオシロスコープが欲しいのですが・・・)
"Mode Settings"
"Self-Level" : セルフレベリング機能のオンオフを、どのように制御するか。
-- "Stick":武装や武装解除時に右にエルロンを保持することによってセルフレベリングをオンにします。左にエルロンを保持すると解除します。
-- "AUX":AUXスイッチチャンネルによってセルフレベリング機能を制御します。
"I part of PI":heading-hold機能が制御される方法:
-- "ON":常にオン。
-- "AUX":AUXスイッチチャンネルは、heading-hold機能を切り替えます。
FW1.2にて項目削除
"Arming":アーミング機能を制御する方法:
-- "Stick":フル右ラダー、ゼロスロットルでアーミング。 フル左ラダー、ゼロスロットルでアーミング解除(SAFEモード)。
-- "ON":常にオン。この設定を使用するには注意を要します。 この設定は飛行機の安定化のためだけにFCを使用するとき等に使います。
項目削除を確認
"Link Roll Pitch":
-- "ON":ロールとピッチゲインパラメータのどちらかを編集しても、RollとPitch両方の設定値を同じ値にします。
-- "off":個別にロールとピッチゲインパラメータを編集します。multicopterがRoll軸とエルロン軸に異なる慣性質量を持っているときに使用します。
“Auto Disarm":
--Yes:アーミング状態で30秒間スロットルが0の場合には、Disarm(SAFE)状態になります。
--No :自動でSAFEモードに戻りません。
”sat or cppm”:動作未検証
--Yes:サテライトレシーバーとtarotケーブルで接続する場合や受信機との接続でチャンネル割り付けを変更したい場合にYESに設定します。
--No :(デフォルト)
"Stick Scaling"
:ここでは、スティックからあなたの好みへの応答を調整することができます。数値が高いほど、より高い応答を与えます。送信機のエンドポイントまたはボリューム調整に似ています。また、スティックのレスポンスを調整し、さらに応答が必要な場合はスティックのスケーリングを使用するように送信機を調整することができます。
"Misc. Settings"(その他の設定)
- "minimum throttle(最小スロットル)":デフォルト=10 スロットルがゼロであるときに接続されているすべてのモーターが停止を保持するのに十分なだけ高く調整します。
- "LCDコントラスト":LCDのコントラストを調整します。FW1.2にて項目削除
-"height Dampening":
-"height D. Limit": 30
-"alarm 1/10 vltage":
-"servo filtter":デフォルト=50
"Self-Level setting":自己水平維持機能についての設定をします。
- "Self Level Gain":セルフレベリングのパワー。数字が大きいほど強力です。
- "Self level Limit":セルフレベリングの最大パワーを制限します。数字が大きいほど、高いLimitになります。
*FW1.4でのデフォルト設定値はGain:100 Limit:20 となっています。
*ACC(selfleveling)時のロール、ピッチ方向のトリムが行えるようになった。
-"ACC Trim Roll":デフォルト=0
-"ACC Trim Pitch":デフォルト=0
“Camera Stab Settings”:カメラマウント(ジンバル)二軸制御
Roll gain,Pitch gainの数値を0以外にすると出力チャンネルの7chがロール軸、8chがピッチ軸コントロール用サーボ出力になります。
-“Roll gain" :デフォルト=0
-“Roll offset" :50
-“pitch gain" :デフォルト=0
-“pitch offset" :50
"Sensor Test"
"Sensor ACC Calibration"
LCD上の指示に従ってください。キャリブレーションは、初期セットアップに一度行う必要があります。
ファームウエアバージョンアップで初期化される事が多いので、管理人はバージョンアップしたらキャリブレーションし直すことにしています。
”sat-CPPM Channels":動作未検証
"CPPM settings":入力ch(レシーバーとの接続ch)の定義を変更出来る。
-"Roll":デフォルト=1
-"Pitch":デフォルト=2
-"Throttle":デフォルト=3
-"Yaw":デフォルト=4
-"AUX":デフォルト=5
"Mixer Editor"(この項目は十分な知識を持った上で設定されると良いと思います、一般的なフレームキットを使用している場合には、設定の変更は必要無いと思います)
多機能であるがゆえに設定のこつが必要です。
このメニューでは、どこのモーターがスティックやセンサーから取得した信号に対して影響するかを設定することができます。
これは、最大8個のモータやサーボに対して、任意の構成(レイアウト)を可能にするためです。
設定する出力チャンネル(1~8)を変更するには、右上の番号がハイライト表示されたら、”Change”を押します
-*- "スロットル":スロットルコマンドの量。出力チャネルがESCに接続されている場合通常100%。
-*- "エルロン":エルロン/ロールコマンドの量。ロール軸の右側にあるモーターの値は正、ロール軸の左側に負の数値を使用します。値は、ロール軸からモータまでの距離によって与えられる。数値が大きいほど遠い。
-*- "エレベーター":エレベーター/ピッチコマンドの量。ピッチ軸の後ろ側のモーターに正の、ピッチ軸のフロント側のモーターは負の数値を使用します。値は、ピッチ軸からモーターまでの距離によって与えられる。数値が大きいほど遠い。
-*- "ラダー":ラダー/ヨーコマンドの量。通常100%。 CCWプロペラには正の、CW回転プロペラには負の数値を使用します。サーボの動作方向も同じように正、負を入れ替えることでジャイロ動作方向を入れ替えできます。
-*- "オフセット":チャンネル出力に一定のオフセットを適用します。出力チャンネルにESCが接続されている場合は、必ず 0(ゼロ)とします。
サーボを接続している場合は約50%にします。この値を調整することによってサーボの位置を微調整できます。(ニュートラルポイントの微調整)
-*- "タイプ":チャネルに接続されているタイプ(サーボやESC)に設定します。
-**- ESCの場合:PWM出力レートは常にHighです。SAFE状態やスロットルがアイドル状態ではゼロを出力します。ARMING時にスロットルがゼロの時、前記の "その他。設定"サブメニュー "最小スロットル"の項目を適用します。
-**-サーボの場合:PWM出力レートがハイレベルまたはローレベルにすることができます。オフセット値は、SAFEモードやスロットルがアイドル状態にあるときに出力されます。(通常サーボセンターと呼ばれる50%にします)
-*- "レート":ESCまたはデジタルサーボのための高レート(400Hzの)、またはアナログサーボのための低レート(80Hzの場合)。
"Show Motor Layout":グラフィカルに構成を示しています。ビルドおよび/またはあなたのカスタムミキサーテーブルをチェックするために使用します。
"Load Motor Layout":多くのプリセットレイアウトのいずれかをロードできます。ロードされた設定は、後で変更することができます。
"Factory Reset":ファームウェアデフォルトへのリセット。全ての設定値をファームウェアの初期値にリセットします
-*-*-*-*-*-*-*-*-*-*-*-
PI 制御の設定については、FW1.2にて提示されたチューニングガイドのこちらの記事を参照ください。
以下 旧バージョンのチューニングガイド
1:KK2は、送信機のスロットルスティックがニュートラルになっていることを確認してください。 "レシーバ·テスト"メニューに移動し、各値がゼロになるようトリムで調整します。
2: "PIエディタ"メニューに移動し、Pに150を設定して、Iはロールとピッチ軸の両方にゼロにする。ピッチ軸が自動的にロール軸と同じ値に変更されるので、ロール軸だけを編集します。P-limitとI-limitはそのままにしておきます。ほとんどの場合、それらを変更する必要はありません。
3:このビデオでは、航空機を停空飛翔、multicopterのPIゲインの応答挙動を比較しています。http://www.youtube.com/watch?v=YNzqTGEl2xQ
4:応答に応じて調整します。あなたが初心者で、まだ周りに飛ばない場合は、単に I ゲインをゼロするか、デフォルト値のままにします。また、ヨー軸のPI-ゲインはデフォルトのままです、しかし、あなたがstring tuning method.を使用する場合は、それらをゼロにすることを忘れないでください。
FW1.2
PI editor のデフォルト設定値
ロール/ピッチ軸(共通値)
P gain = 50 P limit =100 I gain = 25 I limit =20
ヨー軸(ラダー軸)
P gain = 50 P limit =20 I gain = 50 I limit =10
旧バージョン
PI editor のデフォルト設定値
ロール/ピッチ軸(共通値)
P gain = 150 P limit =100 I gain = 50 I limit =20
ヨー軸(ラダー軸)
P gain = 150 P limit =20 I gain = 50 I limit =10
2012-08-17 初稿
2012/09/05 改訂
2012/10/16 fw1.2変更点を反映(未完)
2012/11/07 fw1.3,1.4変更点を反映(未完)
2012/10/16 fw1.5変更点を反映
2012/12/28 FW1.5カメラジンバルスタビリティの設定について検証したので追記
2013/01/17 Y3コプターなどのヨー軸(ラダー)にサーボを使用する際のポイントを”mixer editor"の項目に追記
2013/03/15 コメントにてご指導頂いた点を見直し訂正 FC電源関連の重要ポイント
2013/04/01 ファームウェアのアップデートの際に管理人が使用しているUSB-APSアダプタ用ドライバとkkmulticopterflashtoolの提供元へのLinkを追記
2013/04/15 BECに関する説明追記
2013/06/05 低電圧アラームに関する事項追記
2013/06/28 fw1.6a変更点並びに各項目を見直し改訂(未完)
2014/1/2 KK2.0ディスコン KK2.1(アップグレード品)対応のため改訂
↧
ブログに音声入力で投稿してみる
これはなかなか難しい( ´(ェ)`)かな・・・
それでも割と反応がいいので今日もそうなのですが、体調が良くなくて 机の前にいるのが大変な時には、この方法はものすごく楽に感じます。
・・・とか言いつつ なかなかうまくいっている
これを使えばもっともっと楽に楽しく そしてしっかりとした内容の記事が書けそうなきがしてきました(この行は一気に入力しました)滑舌よくはっきりとするように心がけて話をすると、かなり正確に 変換してくれます。
今思えば もう30年も前に使っていたパソコンでの音声入力認識ソフトのあの変換効率はなんだったのだろうかとヽ(`Д´)ノ 当然といえば当然なんですけど(´Д`;)
ここまで入力してしてこれは本当に使えるき出してきました(`・∀・´)
今使ってるのが nexus7なので写真の機能がちょっと残念なので使えませんが、同じ入力方法をとって、搭載カメラのですね 性能の良いタブレットやスマホを使えば、一般的のブログ記事を書いたり、 また写真の貼り付けは相当楽になると思います。
うん、これ楽ちんだーヾ(@^▽^@)ノ
(*^-^*)ノ~~マタネー
Android携帯nexus7からの投稿
↧
ラズベリードリーム?!

久しぶりに新しいことを始めようと いろいろ?と買ってみました。
今話題のラズベリーパイを使ってマルチコプターなどのfpv用の送信機を作ってみたいと考えてます。
これなら市販のwi-fi通信用の安価なusbアダプターを使えば合法的に画像の送信が出来るようになると思います。
フライトコントローラーがmultiWiiであれば、コントローラーからの各種センサー信号も合わせて送れるはずです…はず(笑)たぶん、きっと(笑´∀`)
税務署への申告関係がめちゃくちゃ苦手!!よくわかんなくてギブアップ寸前、確定申告が終わるまではオアズケカモデスガ(~_~;)
Android携帯からの投稿
↧
↧
phantom フルオプション機作ってみました

久しぶりに体調が良かったので ファントムフルオプション機のtestflightに行って来ました。
ツインバッテリータイプにして、armも延長して 10インチのプロペラを付けています。
今日のtestflightは、親戚宅の 航空写真を撮るという目的もあって、やや風が吹く中のフライトでしたが、終始安定した飛行でとても満足ヽ(*´∀`)ノ
今回の新しいファームウェアでは、飛行する区域の制限をホームポイント基準に設定することが可能になっていて、高度制限を20mとしてあったのを忘れて、途中であれ おかしい上昇しない?とあたふたしていたのは、秘密です(//∇//)
ゴープロで撮影した空撮動画もあるのですが、親戚宅の航空写真を撮るためでしたので目新しくも、面白そうでもないので公開予定はありませーん\( *´ω`* )/
参考
撮影のフライト、ホバリングテスト込みで
約10分の飛行後バッテリー残電圧は11.5V
バッテリーを使い切るにはあと10分位飛行が可能な感じがしましだ。
外気温10度以下でこの飛行時間は、中々高性能?などと自画自賛して 今日は終わりにしときます
バイバイ(ヾ(´・ω・`)
Android携帯からの投稿
↧
ハイテック製 Aurora9 送信機用バッテリーコネクタ
備忘録
純正バッテリーはNi-MH 1300mAh
Ni-MHにしては?自己放電しやすい感じで、例によってメモリー効果もあるので
管理がめんどくさい!!
その上純正交換部品(純正バッテリー)は安く販売しているところでも3200円~
送信機のバッテリーコンテナ容量は十分にあるので2SLipoに交換しようと思って
コネクタを外してみた・・・・!!
うはっ、これも「もれっくす」かぁ
JXT-XHあたりを使ってくれてればコネクタごと¢( ・・)ノ゜ポイできたのに・・・
Lipoバッテリーのリード交換しないと・・・・
Molex 2.50mm pitch mini-Spox ハウジング 2P
注 新型のAurora9Xはどうなってるか知りません。
↧
PR: DYNAMITE 6 CAMPAIGN
 |
| 登録無料!ご当地の豪華逸品グルメが当たる! |
↧